Download
1 / 22
250 likes | 403 Views
Ultrasonic Motors. Eric Ruben Mechatronics Literature Survey Dept. of Electrical and Computer Engineering Utah State University E: e.r@aggiemail.usu.edu T: 801- 916-2400. 2/17/2009. Outline. Introduction History Classifications Basic Principle Linear USM Spherical USM Future Work

E N D
Ultrasonic Motors Eric Ruben Mechatronics Literature Survey Dept. of Electrical and Computer Engineering Utah State University E: e.r@aggiemail.usu.edu T: 801-916-2400 2/17/2009
Outline • Introduction • History • Classifications • Basic Principle • Linear USM • Spherical USM • Future Work • Works Cited ECE5320 Mechatronics. Assignment#1 Survey on sensors and actuators
Introduction • An ultrasonic motor (USM) converts ultrasonic vibrations into linear or rotary motion. • USMs plays an important role a few niche markets where the size, torque, speed or other requirements could not be satisfied by the traditional EM motor. • The two largest markets for USMs are cameras and automotive but they are also found in medical equipment (MRIs) and as robotic servo motors. ECE5320 Mechatronics. Assignment#1 Survey on sensors and actuators
Introduction • USMs are often called solid state motors because they have very few moving parts and they can be fabricated like integrated circuits to be either macroscopic or microscopic. • For the last 29 years USMs have found their way into a number of applications requiring compact, efficient and intermittent motion. ECE5320 Mechatronics. Assignment#1 Survey on sensors and actuators
Introduction Some applications where USMs have been used are: Camera lens autofocus. Spacecraft planetary instruments. Medical equipment (MRIs etc). Small robotic joints. ECE5320 Mechatronics. Assignment#1 Survey on sensors and actuators
Introduction The major advantages of USMs are: Compact, lightweight, flexible and robust. High positioning accuracy. High low-speed torque and holding torque. Unaffected by external electric or magnetic fields. Quiet drive system. Hard brake with no backlash. Variable stroke. Quick response. ECE5320 Mechatronics. Assignment#1 Survey on sensors and actuators
History • 1980. The first USM was developed by Sashida. • 1986. Cannon pioneers the ring type USM for use in SLR camera lens autofocus. • 1990. The first micro USM is developed by Canon to for a new camera autofocus. • 2003. Cannon released a new micro USM that is ½ the size of the first with the same output torque. • 2005. An international conference was held in Yokohama Japan to aid development of multiple DOF USMs. ECE5320 Mechatronics. Assignment#1 Survey on sensors and actuators
Classifications • USMs can be classified in the following ways: • Mode of operation: • Static • Resonant • Type of motion: • Rotary • Linear • Shape of implementation: • Beam • Rod • Disk ECE5320 Mechatronics. Assignment#1 Survey on sensors and actuators
Basic Principle • One thing all USMs have in common is their use of piezoelectric material to transform electrical energy to mechanical energy. • USMs typically use ceramics derived from lead-zirconatetitanate (abbreviated PZT). • After the PZT ceramic is shaped and fired, it is then electric field polarized. This allows the material to deform with a changing electric field. ECE5320 Mechatronics. Assignment#1 Survey on sensors and actuators
Basic Principle • Here we will discuss the operation of a ring type USM. Like traditional motors, USMs have a stator and a rotor. • Some USMs use a toothed stator to increase the holding torque. Other motors simply rely on frictional forces. • As shown in the illustration on the right, the bottom layer of the stator is composed of the PZT material mentioned earlier. ECE5320 Mechatronics. Assignment#1 Survey on sensors and actuators
Basic Principle • Two electrical signals with orthogonal modes (like sin(wt) and cos(wt)) are introduced in the stator material. • If a constant phase difference exists between the two modes a traveling wave is created in the stator. Otherwise the wave is standing. ECE5320 Mechatronics. Assignment#1 Survey on sensors and actuators
Basic Principle • The repeated rolling motion of the stator creates microscopic orbit of the stator’s surface particles (much like water drops in a water wave. These small movements move the rotor forward. • Thus, the traveling wave in the flexural stator material moves in the opposite direction of the rotor spin. ECE5320 Mechatronics. Assignment#1 Survey on sensors and actuators
Basic Principle • The stator may drive the rotor using tiny teeth or simply the force of friction. • While the angular velocity of the rotor is proportional to the frequency of the traveling wave, that does not mean they are equal. The traveling wave may pass through the stator several times for a single rotation of the rotor. ECE5320 Mechatronics. Assignment#1 Survey on sensors and actuators
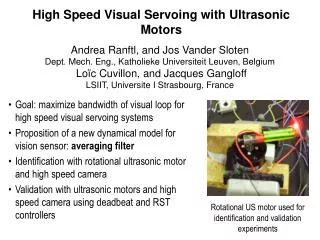
Linear USM • Linear USMs, sometimes called “tube” or “rod” USMs, also use piezoelectric metals or ceramics for actuation. • Show here is a picture of New Scale Technologies tiny “Squiggle” motor. • The Squiggle motor weighs about 30g and boasts a stall force of 10N. Micro deformations also give resolutions as high as 1nm, and max speeds of 15mm/sec. ECE5320 Mechatronics. Assignment#1 Survey on sensors and actuators
Linear USM • The Piezo LEGS motor, developed by MicroMo Electronics Inc., illustrates one popular technique for linear USM actuation. • Like other USMs, the LEGS motor generates motion in discrete steps. • 4 bimetallic metal/ceramic “legs” are positioned around a single nut on a threaded rod. ECE5320 Mechatronics. Assignment#1 Survey on sensors and actuators
Linear USM • Applying voltage to a PZT leg causes it to change shape. This strain in the leg causes the nut to bend and shift on the threaded rod. • By synchronizing the 4 legs an elliptical force pattern moves the rod in either the forward or reverse direction. • Because deformations are small, several thousand pulses/sec are needed. ECE5320 Mechatronics. Assignment#1 Survey on sensors and actuators
Spherical USM • Spherical USMs may be employed when more than one degree of freedom is needed. Potential applications include surgical robots or robotic eyes. • The concept of a spherical USM is simple. Three separate ring USMs control actuation in the x, y and z directions. Thus, the sphere can be given any orientation in 3 space. ECE5320 Mechatronics. Assignment#1 Survey on sensors and actuators
Future Work USMs have lots of potential for use in medical applications. One very promising research area is in medical diagnostic instruments. The Robotics Institute of Carnegie Mellon University and the Division of Cardiac Surgery at the University of Pittsburgh are teaming up to create a tiny robot called the HeartLander. ECE5320 Mechatronics. Assignment#1 Survey on sensors and actuators
Future Work The HeartLander is a tiny robot that surgeons could insert into a patient’s chest cavity through a minimally invasive incision. This tiny robot could then move along the surface of the heart and perform interventions. The surgeon would be able to control every movement via a controller and monitor external to the patients body. ECE5320 Mechatronics. Assignment#1 Survey on sensors and actuators
Works Cited • Canon. (2007). Using Ultrasonic Vibrations to Drive Focus and Zoom Lenses. Retrieved March 2, 2009, from Canon: http://www.canon.com/technology/canon_tech/explanation/usm.html • Carnegie Mellon University. (2007). HeartLander. Retrieved February 22, 2009, from CMU: http://www.cs.cmu.edu/~heartlander/index.html ECE5320 Mechatronics. Assignment#1 Survey on sensors and actuators
Works Cited • Kenedy, B. (2007, July). Piezoelectric motors: big power, small package. Retrieved March 2, 2009, from Micro manufacturing: http://micromanufacturing.com/showthread.php?t=517 • Shyh-Shiuh Lih, Y. B.-C. (1997, March). Rotary Ultrasonic Motors Actuated By Traveling Flexural Waves. Retrieved March 3, 2009, from Nasa Papers: http://ndeaa.jpl.nasa.gov/nasa-nde/lommas/spie-usm97.htm ECE5320 Mechatronics. Assignment#1 Survey on sensors and actuators
Works Cited • Toyama, D. S. (2008, April). Sherical ultrasonic motor, piezoelectric actuator, spherical sensing system. Retrieved March 2, 2009, from TUAT: http://www.tuat.ac.jp/~crc/m/img/m_05_MT4_Spherical%20Ultrasonic%20Motor%20Shigeki%20Toyama.pdf ECE5320 Mechatronics. Assignment#1 Survey on sensors and actuators