Download
1 / 127
1.27k likes | 1.32k Views
Learn about the Gaussian Expansion Method and its applications in solving 3- and 4-body problems in atomic and nuclear physics. Understand the intricacies of Schrödinger equation calculations and the importance of accurate solutions in various physics fields. Discover how the method is used in atomic physics with constituents like electrons and nuclei, and the challenges faced in nuclear physics due to strong nucleon interactions. Explore the Gaussian Expansion Method developed by the Kyushu University Group and its high-precision calculations in complex systems.

E N D
Gaussian Expansion Method and its application to atomic and nuclear physics E. Hiyama(RIKEN)
Section 1 Introduction
Outline of my lecture (1) Method for three-body problem (2) Application to Nuclear Physics (3) Application to Atomic Physics
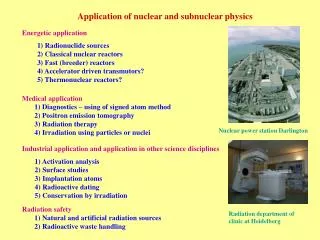
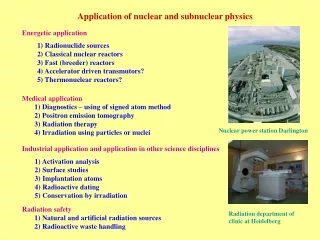
Many important problems in physics can be attributed to solving accurately Schrödinger equation for 3- and 4-body systems. By solving the equation, i) we can predict various observable before measurement, and ii) we can obtain new understandings by comparing the observed data and our theoretical prediction. For this purpose, it is necessary i) to develop the method to calculate 3- and 4-body problems precisely, and ii) to apply to various fields such as nuclear physics as well as atomic physics.
Atomic physics He atom etc. H molecule etc. nucleus electron Interaction V(r) 2-body 3-body 4-body In atomic physics, constituent particles are electrons and nuclei. melectron << mnucleus Coulomb interaction is weak, therefore, for example, using adiabatic approximation, we can perform 3- and 4-body calculations more easily than those in the case of nuclear physics.
Nuclear Physics Interaction V(r) Four-body Two-body Three-body However, in nuclear physics, since interaction between nucleon and nucleon is strong, we have no approximation method to solve three- and four-body problems accurately. Then, We should develop the method for solving various few-body problem accurately.
Nuclear physics interaction V(r) 4-body 2-body 3-body In the 2-body problem, since how to calculate 2-body Schrödinger equation is written in the textbook of quantum mechanics, everybody can calculate the 2-body problem exactly. i) However, it is usually difficult to calculate 3-body and 4–body problem since the interaction is strong.
ii) In 3-body system, there are many rearrangement channels. Simple in two-body system Strongly coupling Loosely coupling If one more particle is added to…. 3-body problem : commplicated! Strongly coupling (2+1) coupling Three-types Loosely coupling
4-body problem is more complicate. (2+2 )binding three types Strongly binding Loosely binding (3+1) binding four tyes We should take account of these rearrangement and solve accurately.
Few-body research group to solve four-body problem Only 7 group in the world! (in 2001) ・RIKEN & Kyushu Univ.(Japan) ・Niigata Univ. (Japan) ・Ruhr Univ. (Germany) ・Pisa Univ. (Italy) ・Arizona Univ. (U.S.A.) ・Argonne National Laboratory (U.S.A.) ・Trento Univ. (Italy)
Our few-body caluclation method Gaussian Expansion Method (GEM) , since 1987 , ・A variational method using Gaussian basis functions ・Take all the sets of Jacobi coordinates Developed by Kyushu Univ. Group, Kamimura and his collaborators. Review article : E. Hiyama, M. Kamimura and Y. Kino, Prog. Part. Nucl. Phys. 51 (2003), 223. High-precision calculations of various 3- and 4-body systems: Exotic atoms / molecules , 3- and 4-nucleon systems, multi-cluster structure of light nuclei, Light hypernuclei, 3-quark systems,
Section 3 jewel 寶石 Gaussian Expansion Method (GEM) for Few-Body Systems 1 Gaussians 0 0 100
In order to solve the Schrödinger equation, we use Rayleigh-Ritz variational method (変分法)and we obtain eigen value E and eigen function Ψ. Here, we expand the total wavefunction in terms of a set of L2-integrable basis function {Φn:n=1,….,N)} The Rayleigh-Ritz variational principle leads to a generalized matrix eigenvalue problem. =
Where the energy and overlap matrix elements are given by Hin= <Φi | H | Φn > Nin = <Φi | 1 | Φn> Next, by solving eigenstate problem, we get eigenenergy E and unknown coefficientsCn . ( Hin) - E ( Ni n ) Cn =0
Variational method (変分法) for Schroedinger Eq. We check the energy of a trial function Suppose that we have a ortho-normal complete set Expectation value of H This can be= , when How to find accurate ? How about excited states ?
Example of the simple variational method Calculation of the ground-state energy of Hydrogen atom electron Coulomb potential Atomic unit proton Atomic unit H Distance in unit of Bohr radius • Trial function • Gaussian function exp(-(r/a)2) • Exponential function exp(-r/a) Energy in atomic unit
Rayleigh-Ritz variational method can be accurate for the ground state and some excited states Here, we expand the total wavefunction in terms of a set of L2-integrable non-orthogonal basis function {Φn: n=1,….,N)} More general than orthogonal basis The Rayleigh-Ritz variational principle leads to a generalized matrix eigenvalue problem. =
Where the energy and overlap matrix elements are given by Hin= <Φi | H | Φn > (i, n =1,…,N) Nin = <Φi | 1 | Φn> --- non-orthogonal basis Next, we get eigenenergy E and coefficientsCn by solving generalized matrix eigenvalue problem, . ( Hin) - E ( Ni n ) Cn =0 solution
Test in hydrogen atom E in atomic unit of R in atomic unit (Bohr radius)
Where the energy and overlap matrix elements are given by Hin= <Φi | H | Φn > (i, n =1,…,N) Nin = <Φi | 1 | Φn> --- non-orthogonal basis Next, we get eigenenergy E and coefficientsCn by solving generalized matrix eigenvalue problem, . ( Hin) - E ( Ni n ) Cn =0 solution
3 r R r 2 R 3 1 R 2 1 2 1 r 3 C=2 C=1 C=3 Why we take 3-channels?
small-size coupling For Example r 2 R 2 C=2 channel is suitable to describe this type of configuration. If we use C=1 channel only, we shall need a large number of basis functions to describe this configuration. 3 r R r 2 R 3 1 R 2 1 2 1 r 3 C=2 C=1 C=3
3 r R r 2 R 3 1 R 2 1 2 1 r 3 C=2 C=1 C=3 Use of the 3-channel basis functions provides a sufficiently large function space that cannot be reached by the single-channel basis fuctiones. This has been essentially important in the success of our GEM method.
3 r R r 2 R 3 1 R 2 1 2 1 r 3 C=2 C=1 C=3 Basis functions of each Jacobi coordinate in the next slide Determined by diagonalizing H
Clebsh-Gordon coefficient in order to couple two angular momenta l and LtoJ. Spherical harmonics Complicated !
Section 3.1 Gaussian basis functions
An important issue of the variational method is how to select a good set of basis functions. What is good set of basis functions? Using them, • we can describe well the properties of wave function: a) short-ranged correlation, b) long-range tail behaviour, c) highly oscillatory character (2) we can easily calculate the matrix elements of Hamiltonian Hin= <Φi | H | Φn >, Nin = <Φi | 1 | Φn>
Using this three-body basis function, we calculate the matrix element of Hamiltonian. Channel b Channel a The key point of solving 3-body problem: To propose basis functions to calculate the matrix elements easily between basis functions of different channels The suited basis function is Gaussian basis function proposed by Kyushu Univ. Group (afterwards, we shall propose more improved ‘infinitesimally Gaussian Lobe basis functions’).
For this purpose, we use the following basis function: r Geometric progression 等比數列 The Gaussian basis function is suitable not only for the calculation of the matrix elements but also for describing short-range correlations and long-range tail behaviour. Geometric progression
Gaussian basis function proposed by Kyushu Univ. Group r If the interaction between constituent particles is central force, we can calculate the 3-body matrix element easily (but not easy for beginners). The method has been applied to nuclear physics successfully. • However, it is very difficult to apply to • 3-body problem with complicated interaction • such as spin-orbit forces and tensor forces. • ii) 4-body problems. July 4th 2016
Why difficult? I shall explain why.
General case of 3-body matrix calculation c=1 c=3 c=2 r3, R3 c=1 to c=3 c=2 to c=3 座標変換
座標変換 c=1 to c=3 Complicated transformation of Y- 2個 r Similarly for Y- 6個 Radial part: c=1 to c=3 Y- 2個 Modified Bessel function Y- 共計10個 Total number of Y-functions =10
In 3-body problems, we meet these angle-intergrations including at least10shperical harmonics, 24shperical harmonics in4-body problems This calculation is very difficult, especially for beginners such as master-course students. The result is is
<Φ(1)JM(r1,R1)| | Φ(2)JM(r2,R2)> =< r1l R1L e-νr e -λR [Yl(r1) x YL(R1)]JM | | 2 The 3-body interaction matrix element : Gaussian potential ^ ^ 2 2 ^ 2 ^ > x r2l R2L e-νr e -λR [Yl(r2) x YL(R2)]JM =∑ ∑ ∑ ∑ γλδl-λγ’ΛδL’-λ X √(2l-1)!(2L’-1)!/(2λ!)(2(l’-λ)!)(2Λ)!(2(L’-Λ)!(2I+1)!(2J+1)! Λ l’-λ l’ Λ L’-Λ L’ I K J x (-)l+I+J (λΛ00|I0) (l’-λ L’-λ|K0) Clebsch-Gorgon coefficent 9j symbol Racah coeffiient X ∑ W(IlKL;jJ) (KL00|j0) (Il00|j0)(2m+2j+1)!!/2m+j+n+4 m!(ξ-ξ2/η)j+n+j/2 m p (ξ2/(ζη-ξ2))p x ∑ (2p+2j+2n+1)!!/(2P+2j+1)!!
3-body matrix elements Summerizing, It is laborious to integrate over the angular coordinate of spherical harmonics. a)In the case of calculating the matrix element of central force, we have 10 spherical harmonics’. This is hard for beginner. b)In the case of complicated interaction such as spin-orbit force and tensor force, we have more than 10 spherical harmonics’. c)In the case of four-body problem, we have 24 spherical harmonics at least. This is hard even for experts. This is hard even for experts.
Difficult points using a) 3-body problem using complicated interactions b) 4-body problem It is difficult even for expert to apply the method to a) and b) cases. We should overcome this difficulty and make the method to be applicable for beginners such as master course students. I proposed (1994): Infinitesimally shifted Gaussian Lobe basis function
Section 3.1 無限小 位移 Infinitesimally Shifted Gaussian Lobe basis function
無限小 位移 Infinitesimally shifted Gaussian Lobe basis function What is Lobe ? 來自天線的電波輻射的圖形 Ear 耳 back lobe Lobe = something roundly sticking out 圓的突出部 Ear-Lobe Radiation pattern of antennas shows a pattern of Lobes at various angles. 耳垂
Infinitesimally Shifted Gaussian Lobe (ISGL) basis Function r D r 位移 X A Gaussian function around the origin Describe angular dependence by sum of shifted Gaussian functions (without spherical harmonics) Shifted parameter C, D can be easily determined. The simplest example
Construction of the ISGL function r D r The simplest example l =1, m=0 D D 障礙 only Gaussians, no x-, y-, z-polynomial This type of polynomial factor is tedious to treat in the full-space integration Next, we prove this equation.
Taylor expansion End of proof Remember !! This means we can make the following replacement with Gaussians only: (similarly for x and y) We shall use it for general case of In the next slide, we show how accurate is the above at =1.0 and =0.5 and 0.25
Lobe a=1 Mixture of L=3 component.
D r r using the mathematical formura simple factor and (similarly for x and y) , Details is written in E. Hiyama et al. Prog. Part. Nucl. Phys. 51 (2003) 223.
Infinitesimally Shifted Gaussian Lobe (ISGL) basis Function r D r r D r 1) How to calclate analytically the matrix elements --- Norm-overlap --- Hamiltonian 2) How and when do we take in the calculation
Section 3.2 Round-off error in computation 有效位數的逸失 1) Failure of the old Gaussian Lobe method (1960’s) 2) How did I overcome the dificulty in 1) and discover the new ISGL functions?
First of all, I show an example of the round-off error. 有效位數的逸失 In calculation by computers, usually numbers are given in 15 significant figures (digits) . 有效位數 15 15 however no problem 1.00000000000123 +) 1.00000000000121 2.00000000000244 1.00000000000123 -) 1.00000000000121 0.00000000000002 有效位數=15 = 2 x 10-14 Only one significant figure !! Be careful when subtracting nearly the same numbers. 有效位數=1
Be careful when subtracting nearly the same numbers. A typical dangerous case: ε the 2 terms are nearly equal when is small but finite. Also dangerous is the general case: r D r ε 1)Don’t make any computation using finite . 2) Treat always analyticallyand take analytically". ε
Calculation of 2-body norm matrix element It is too simple but very instructive. 2体問題 Lobe Normal ε ε ε ε ε Norm matrix element 1 1 (straightforward integaration) =1 (for )