Download
1 / 1
10 likes | 89 Views
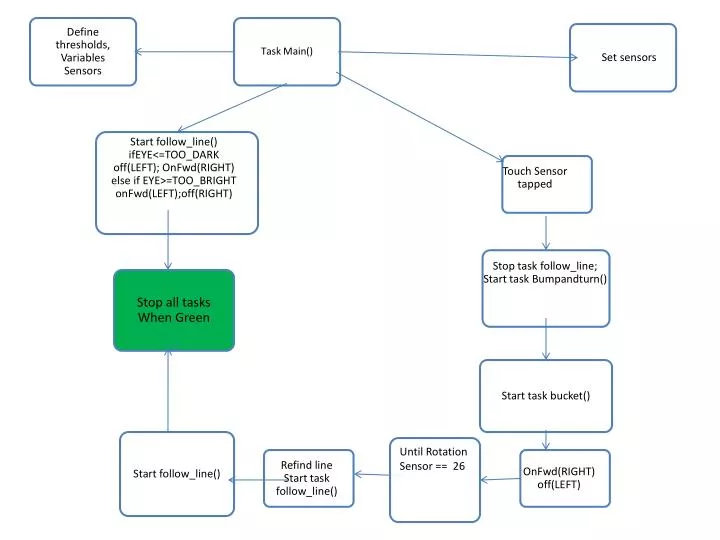
Define thresholds, Variables Sensors. Task Main(). Set sensors. Start follow_line () ifEYE <=TOO_DARK off(LEFT); OnFwd (RIGHT ) else if EYE>=TOO_BRIGHT onFwd (LEFT);off(RIGHT). Touch Sensor tapped . Until Rotation Sensor == 26. Start follow_line (). Start task bucket().

E N D
Define thresholds,VariablesSensors • Task Main() • Set sensors • Start follow_line()ifEYE<=TOO_DARKoff(LEFT); OnFwd(RIGHT)else if EYE>=TOO_BRIGHTonFwd(LEFT);off(RIGHT) • Touch Sensor tapped Until Rotation Sensor == 26 • Start follow_line() • Start task bucket() • Stop task follow_line;Start task Bumpandturn() • Stop all tasks When Green • OnFwd(RIGHT)off(LEFT) • Refind lineStart task follow_line()