Download
1 / 23
250 likes | 688 Views
偏差 的定义:. 误差 的定义:. 第五节 控制系统的稳态误差分析. 一、基本概念. 1. 偏差、误差和稳态误差. 图 3-24 系统结构图. (3-44a). (3-44b). 图 3-24 系统结构图. 图 3-25 等效单位反馈控制系统结构图. 图 3-24 中系统的误差传递函数为 :. 则 :. 图 3-24 系统结构图. (3-45a). (3-45b). (3-46a). 系统的稳态误差为 :. 同理系统的稳态偏差为 :. (3-46b). 2 、有差系统 :. 通常把阶跃输入信号作用下存在误差

E N D
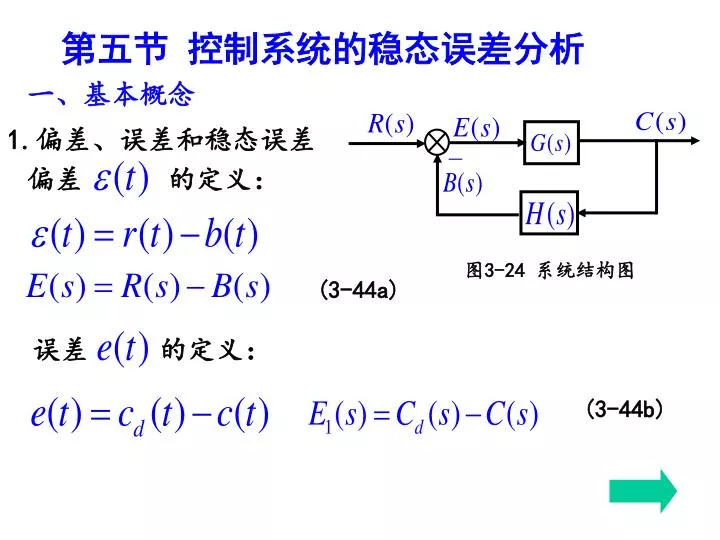
偏差 的定义: 误差 的定义: 第五节 控制系统的稳态误差分析 一、基本概念 1.偏差、误差和稳态误差 图3-24 系统结构图 (3-44a) (3-44b)
图3-24 系统结构图 图3-25 等效单位反馈控制系统结构图
图3-24 中系统的误差传递函数为: 则: 图3-24 系统结构图 (3-45a) (3-45b) (3-46a) 系统的稳态误差为: 同理系统的稳态偏差为: (3-46b)
2、有差系统: 通常把阶跃输入信号作用下存在误差 的系统称为有差系统。 3、无差系统: 通常把阶跃输入信号作用下不存在误 差的系统称为无差系统。 注意:这里所讲的误差指系统原理上的误差。
式(3-47)应用的条件是: 在右半 平面及虚轴(除原点)解析,即没有极点。 二、稳态误差的计算 系统的稳态误差的计算为: (3-47a) 同理系统的稳态偏差的计算为: (3-47b)
例12 已知系统结构如图3-26所示,当参考输入为 时,试求出系统在输入信号作用下的稳态误差。 解:第一步:判别稳定性。 系统的闭环特征方程: 图3-26 例12的结构图 由稳定判据: (1)各项系数大于0,则 (2)列劳斯表 稳定条件为
第二步:求 第三步:利用终值定理求稳态误差 当 ,闭环特征方程(即 的分母)中,没有 右半平面的根,所以满足终值定理应用条件,稳态误差为:
计算结果表明,稳态误差的大小,与系统的开环增益K有关。系统的开环增益越大,稳态误差越小。由此看出,稳态精度与稳定性对K的要求是矛盾的。计算结果表明,稳态误差的大小,与系统的开环增益K有关。系统的开环增益越大,稳态误差越小。由此看出,稳态精度与稳定性对K的要求是矛盾的。
解:第一步:判别稳定性。 由于是一阶系统,所以只 要参数 第二步:求 大于零,系统就稳定。 例13 已知系统结构如图3-27所示,当参考输入为 干扰为 时,试求系统总的稳态误差 图3-27 例13的结构图
为系统的开环增益或开环传递系数或开环放大系数;为系统的开环增益或开环传递系数或开环放大系数; 为系统内部环节的时间常数; 积分环节的个数。根据 的数值,可以对系统进行分类: 三、典型输入信号下稳态偏差的计算 开环传递函数的一般形式为: (3-48) 称为零型系统; 称为一型系统; 称为二型系统; 12 13 14
1、单位阶跃信号输入 (3-49) 为系统的静态位置误差系数 零型系统: Ⅰ型和Ⅱ型系统:
2、单位斜坡信号输入 (3-50) 为系统的静态速度误差系数。 零型系统: Ⅰ型系统: Ⅱ型系统:
3、等加速度信号输入 (3-51) 为系统的静态加速度误差系数 零型系统: Ⅰ型系统: Ⅱ型系统:
如果系统输入信号是多种典型信号代数组合时,应用叠加原理可求的系统的稳态偏差(稳态误差)。为了满足系统稳态响应的要求, 值应按最复杂的输入信号来决定(例如,输入信号包含有阶跃信号和等速度信号时, 值必须大于等于1)。
例14 已知两个系统如图3-28所示,当参考输入为 时,试分别求出两个系统的稳态误差。 (a)Ⅰ型系统 (b)Ⅱ型系统 图3-28 解(1)判别系统的稳定性: 系统稳定 (a)系统特征方程为 系统稳定 (b)系统特征方程为 18 19
(2)系统(a)为Ⅰ型系统,其 不能紧跟 中的分量 ,所以 系统(b)为Ⅱ型系统,其 所以 (3)应用终值定理 (a)Ⅰ型系统 15 17
(b) (b)Ⅱ型系统
四、扰动输入引起的稳态偏差 图3-29 有干扰作用下的反馈系统 (3-52) (3-53) (3-54)
五、提高系统稳态精度的方法 1.增大系统的开环放大系数可以增强系统对参考输入的 跟随能力;增大扰动点以前的前向通道放大系数可以降低 扰动引起的稳态误差. 2.增加前向通道中积分环节的个数,使系统型号提高, 可以消除不同输入信号时的稳态误差. 3.若在系统增加入顺馈控制装置,就能实现既减小系统 的稳态误差,又保证系统稳定性不变的目的.
为待求的前 馈控制装置的传递 函数, 为扰动 作用 (1)对扰动进行补偿 令 图3-30 对扰动进行补偿的系统方框图 则由扰动引起的系统的输出为 (3-55) 令 (3-56)
为待求的前馈控制 装置的传递函数 (2)对输入进行补偿 图3-31 对输入进行补偿的系统方框图 (3-57) 若使 (3-58) (3-59)
