Download
1 / 60
610 likes | 819 Views
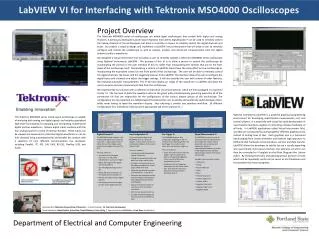
Conventional and Unconventional Finite Element Analysis in Electrophysics. Theory, Formulations and Applications. Igor Tsukerman Department of Electrical and Computer Engineering, The University of Akron, OH 44325-3904 igor@uakron.edu http://coel.ecgf.uakron.edu/~igor.

E N D
Conventional and Unconventional Finite Element Analysis in Electrophysics.Theory, Formulations and Applications. Igor Tsukerman Department of Electrical and Computer Engineering, The University of Akron, OH 44325-3904 igor@uakron.edu http://coel.ecgf.uakron.edu/~igor
Theoretical Analysis: Element Shape and Accuracy • Focus: dependence of interpolation errors on element shape. • A close relationship between FE interpolation errors and properties of FE matrices. • A priori error estimates in terms of eigenvalues / singular values of element stiffness matrices or “edge shape matrices”. • Geometric implications. • Numerical experiments. Igor Tsukerman, FE Theory and Applications
References Igor Tsukerman and Alexander Plaks, Refinement strategies and approximation errors for tetrahedral elements, IEEE Trans. Magn., vol. 35, No. 3, pp.1342-1345, 1999. I.A. Tsukerman, A general accuracy criterion for finite element approximation, IEEE Trans. Magn., vol. 34, pp.2425-2428, 1998. I.A. Tsukerman, Approximation of conservative fields and the element ‘edge shape matrix’, IEEE Trans. Magn., vol. 34, pp.3248-3251, 1998. I.A. Tsukerman, A. Plaks, Comparison of accuracy criteria for approximation of conservative fields on tetrahedra, IEEE Trans. Magn., vol. 34, pp.3252-3255, 1998. Th. Apel, M. Berzins, P.K. Jimack, G. Kunert, A. Plaks, I. Tsukerman, M. Walkley, Mesh Shape and Anisotropic Elements: Theory and Practice, in The Mathematics of Finite Elements and Applications X, J.R. Whiteman (ed.), Elsevier: Amsterdam, 2000, pp. 367-376. Igor A. Tsukerman, Finite element matrices and interpolation errors, submitted to Applied Numerical Mathematics. Igor Tsukerman, FE Theory and Applications
Element Shape and Accuracy:Main Results • Interpolation error in a given energy norm is governed by the maximum eigenvalue (or trace) of the stiffness matrix. • In many cases, the maximum eigenvalue has a clear geometric meaning (e.g. Zlámal’s minimum angle condition and the Synge-Babuška-Aziz maximum angle condition for first order triangular elements). • Applied to interpolation of conservative fields on Nedelec's edge elements, the maximum eigenvalue analysis leads to a new minimum singular value criterion. Igor Tsukerman, FE Theory and Applications
Approximation, Condition Number and Iterative Methods Igor Tsukerman, FE Theory and Applications
The Maximum Eigenvalue ConditionIn Some Familiar Cases L2-Approximation on Tetrahedral Node Elements Igor Tsukerman, FE Theory and Applications
First Order Node Elements Max. eigenvalue estimate for triangular elements: Max. eigenvalue estimate for tetrahedral elements: Igor Tsukerman, FE Theory and Applications
Edge Elements, Conservative Fields The Element ‘Edge Shape Matrix’ Igor Tsukerman, FE Theory and Applications
SVD of the Edge Shape Matrix Igor Tsukerman, FE Theory and Applications
The Minimum Singular Value Igor Tsukerman, FE Theory and Applications
The Minimum Singular Value Estimate Proposition. The minimum singular value criterion for first order triangular elements is equivalent to the Synge-Babuška-Aziz maximum angle condition. Igor Tsukerman, FE Theory and Applications
Minimum Singular Value vs. Geometric Conditions for Tetrahedra The singular value criterion is less stringent than the r / lmax ratio: min(E) r / lmax Solid Angles: Proposition. Let {Ki} be a sequence of tetrahedra with their diameters hi tending to zero, and let Ei be the edge shape matrix of Ki . Then, if the minimum singular value condition is violated, i.e. if min(Ei) 0 as i, then there exists a subsequence of {Ki} for which all solid (trihedral) angles tend to either zero or 2. Igor Tsukerman, FE Theory and Applications
Geometric Conditions for Tetrahedra (continued) Křížek (1992) a sufficient convergence condition: all dihedral angles, as well as all face angles, bounded away from . where Igor Tsukerman, FE Theory and Applications
The Minimum Singular Value Condition vs. Jamet’s Condition = max mins s, cos = min maxs cos s =min (the projection of on the s-th edge is equal to cos s or, alternatively, to the s-th component of ET) min = min Igor Tsukerman, FE Theory and Applications
Application to Mesh Refinement Igor Tsukerman, FE Theory and Applications
Theoretical Analysis: Eddy Current Problems conductors current sources air Igor Tsukerman, FE Theory and Applications
The Maxwell Equations ×E= tB ×H= J+ tD ·D = ·J =0 ·B =0 B = µH; D = E; J = Jgiven+E + boundary and initial conditions Igor Tsukerman, FE Theory and Applications
The Magnetic Scalar Potential ×H= J H = T + Hs u where ×T= E; × Hs = Jgiven ·B =0 ·( u)·(T) = ·( Hs) ×E= tB t(u) +tT + ×(1×T)= 0 Igor Tsukerman, FE Theory and Applications
The Magnetic Vector Potential ·B =0 ×A= B ×E= tB E = tA ·()+·( tA) = 0 ×H= E + tA + ×(1×A)= 0 Note: t pure ODE Igor Tsukerman, FE Theory and Applications
Application: Electric Machines, End Zone, ‘2.5D’ Problems ×E= tB; ×H= J ·B =0; B = µH; J = Jgiven+E + boundary and initial conditions Br(r, , z, t) = Bkr(r, z, t) cos kp, B(r, , z, t) = Bk(r, z, t) sin kp, Jr(r, , z, t) = Jkr(r, z, t) cos kp, etc. Igor Tsukerman, FE Theory and Applications
The FE System for T-u dt + = Igor Tsukerman, FE Theory and Applications
FE-Galerkin Equations for the T-u Method ( u, u) (T , u) = (Tgiven, u) i(u, T) + (1T, T) + i(T, T) = i(Tgiven , T) Igor Tsukerman, FE Theory and Applications
A Superconducting Motor Igor Tsukerman, FE Theory and Applications
Computational Methodology: Hierarchical Basis Multilevel Solvers • Three different but related issues in adaptive mesh refinement: • Implementation of local refinement without violating the “conformity” of the mesh. • Efficient multilevel iterative solvers. • Local ‘a posteriori’ error estimates. • Nonconforming nodes (2D illustration for simplicity) Igor Tsukerman, FE Theory and Applications
Hierarchical Basis Multilevel Solvers (continued) • Dealing with ‘slave’ nodes: • 1. “Green refinement” (generally results in nonnested meshes, which may affect the performance of the iterative solver) • Impose the continuity explicitly (can be accomplished in a natural way in the hierarchical basis). Transformation from nodal to hierarchical values: u(H) = (u1, u2, u3, u4, u5 - (u1+u2)/2, u6 - (u2+u3)/2)T Igor Tsukerman, FE Theory and Applications
Hierarchical Basis Multilevel Solvers (continued) Our algorithm combines: a) the efficient Bramble-Pasciak-Xu (BPX) preconditioner; b) hierarchical basis to handle ‘slave’ nodes; c) adaptive refinement in accordance with local error estimates a(u, u) = (f, u) uW The BPX preconditioner is a double sum A0 is the FE representation of a(u, u) on the coarsest mesh. Igor Tsukerman, FE Theory and Applications
Hierarchical Basis Multilevel Solvers: Numerical Results • Magnetostatic field generated by magnetized particles • ‘Maximum / 8 + Neighbors’ refinement • Zienkiewicz-Zhu local error estimator Igor Tsukerman, FE Theory and Applications
Level Elements Nodes Iterations Time, s 0 648 196 9 < 1 1 5,184 1,183 28 < 1 2 20,157 4,240 36 1 3 59,238 12,109 48 5 4 154,081 31,691 54 18 5 490,809 99,243 75 81 Hierarchical Basis Multilevel Solvers: Numerical Results 300 MHz Pentium II PC (1997-98) Igor Tsukerman, FE Theory and Applications
Hierarchical Basis Multilevel Solvers: References • A. Plaks, I. Tsukerman, S. Painchaud, and L. Tabarovsky, Multigrid methods for open boundary problems in geophysics, IEEE Trans. Magn., vol. 36, No. 4, p.633-636, 2000. • Igor Tsukerman and Alexander Plaks, Hierarchical basis multilevel preconditioners for 3D magnetostatic problems, IEEE Trans. Magn., vol. 35, No.3, pp.1143-1146, 1999. • Igor Tsukerman and Alexander Plaks, Refinement strategies and approximation errors for tetrahedral elements, IEEE Trans. Magn., vol. 35, No. 3, pp.1342-1345, 1999. • I.A.Tsukerman, A. Plaks, H.N. Bertram, Multigrid methods for computation of magnetostatic fields in magnetic recording problems, J. Applied Phys., vol. 83, No. 11, pp.6344-6346, 1998. Igor Tsukerman, FE Theory and Applications
Computational Methodology. Generalized FEM: References Melenk J.M., Babuska I., The partition of unity finite element method: Basic theory and applications, Computer Methods in Applied Mechanics ind Engineering, 139: (1-4) 289-314, 1996. Babuška, I.; Melenk, J. M., The Partition of Unity Method, International Journal for Numerical Methods in Engineering, Volume: 40, Issue: 4, 1997, pp. 727 - 758. Duarte, C.A.; Babuška, I.; Oden, J.T., Generalized finite element methods for three-dimensional structural mechanics problems, Computers and Structures, Volume: 77, Issue: 2, 2000, pp. 215-232. Strouboulis, T.; Babuška, I.; Copps, K., The design and analysis of the Generalized Finite Element Method, Computer Methods in Applied Mechanics and Engineering, Volume: 181, Issue: 1-3, 2000, pp. 43-69. Igor Tsukerman, FE Theory and Applications
Generalized Finite Element Method: References (continued) Leonid Proekt, Igor Tsukerman,, Method of overlapping patches for electro-magnetic computation, IEEE Trans. Magn., vol. 38, No. 2, pp.741-744, 2002. L. Proekt, S. Yuferev, I. Tsukerman, N. Ida, Method of overlapping patches for electromagnetic computation near imperfectly conducting cusps and edges, IEEE Trans. Magn., vol. 38, No. 2, pp.649-652, 2002. I. Tsukerman, General tangentially continuous vector elements, IEEE Trans. Magn., vol. 39, No. 3, pp. 1215–1218, 2003. A. Plaks, I. Tsukerman, G. Friedman, B. Yellen, Generalized Finite Element Method for magnetized nanoparticles, IEEE Trans. Magn., vol. 39, No. 3, pp. 1436–1439, 2003. Igor Tsukerman and Leonid B. Proekt, Generalized scalar and vector elements for electromagnetic com-putation, Proceedings of XI International Symposium on Theoretical Electrical Engineering, August 2001, Linz, Austria. Igor Tsukerman, FE Theory and Applications
Computational Methodology. Generalized FEM: Overlapping Elements I.A. Tsukerman, Overlapping finite elements for problems with movement, IEEE Trans. Magn., vol. 28, No. 5, pp.2247-2249, 1992. Igor Tsukerman, FE Theory and Applications
Overlapping Elements (cont’d) Igor Tsukerman, FE Theory and Applications
2 1 3 4 GFEM: Overlapping Patches The domain is covered by arbitrary overlapping patches i Igor Tsukerman, FE Theory and Applications
Shape Functions at the Boundary Each patch has a “shape function” associated with it. This function is smooth and vanishes outside the patch. Igor Tsukerman, FE Theory and Applications
Shape Functions Inside the Domain Igor Tsukerman, FE Theory and Applications
The Essence of the Method: Normalized Shape Functions The “shape functions”are normalized to the unit sum (partition of unity): Igor Tsukerman, FE Theory and Applications
Partition of Unity Hence any function can be decomposed into its “patch components” The same is true for any approximating function: … and for the approximation error: Igor Tsukerman, FE Theory and Applications
Final Approximating Functions • On each patch, a set of local basis functions {vj} is chosen; these functions need not satisfy any conditions other than providing good local approximation over the patch. • The final approximating functions (that are used in least squares-type methods and possibly FEM) are the products of local basis functions v and the patch shape functions : = Igor Tsukerman, FE Theory and Applications
The Algorithm • Generate a system of overlapping patches. • Choose the shape function for each patch. • Choose local basis functions on each patch. • Generate the final approximating functions (the product of shape and basis functions). • Generate the ‘stiffness’ matrix M and the right hand side. • Solve for the coefficient vector. Igor Tsukerman, FE Theory and Applications
Past Research. Applications: Geophysical Modeling • Unbounded problems in geophysical logging • Multilayered media • Spatial transform of the exterior region • Local refinement, ‘hanging’ nodes, hierarchical bases • The BPX preconditioner Igor Tsukerman, FE Theory and Applications
Spatial Mappings (u) = 0 J = Igor Tsukerman, FE Theory and Applications
Ground Formations Igor Tsukerman, FE Theory and Applications
A Sample Geophysical Problem with Cylindrical Outer Boundary Igor Tsukerman, FE Theory and Applications
Results for the Model Problem Igor Tsukerman, FE Theory and Applications
Simulation Examples Igor Tsukerman, FE Theory and Applications
Applications: Electric Machines, Coupled Field-Circuit Problems Igor Tsukerman, FE Theory and Applications
Field-Circuit Problem: Equations Field equations (A = Az ): ×(1×A) + (tA + gk)= 0 (massive cond. k(m)) ×(1×A) = Sk1(P(s)i)kwk(x, y) (stranded cond. k(s)) ×(1×A) = Jgiven (source region (0)) Integral conditions (total currents): + gk + (P(m)i)k = 0 Equations for circuit mesh currents: Sk1(P(s)i)+ (P(m)i) Ri Mdti P(s) R(s) P(s)i = vsrc Igor Tsukerman, FE Theory and Applications
Field-Circuit FE System (Linear) U dty + Vy = f(t) U = V = Igor Tsukerman, FE Theory and Applications
Field Lines in the Central Cross-Section Igor Tsukerman, FE Theory and Applications