Download
1 / 26
260 likes | 407 Views
Evaluation of a Precision Hover Task Using Time-Varying Cutoff Frequency. Amanda K. Lampton, Ph.D. David H. Klyde Daniel J. Alvarez P. Chase Schulze Peter M. Thompson, Ph.D. Chi-Ying Liang, Ph.D. Systems Technology, Inc. Hawthorne, CA Presented to

E N D
Evaluation of a Precision Hover Task Using Time-Varying Cutoff Frequency Amanda K. Lampton, Ph.D. David H. Klyde Daniel J. Alvarez P. Chase Schulze Peter M. Thompson, Ph.D. Chi-Ying Liang, Ph.D. Systems Technology, Inc. Hawthorne, CA Presented to 67th Annual Forum of the American Helicopter Society Virginia Beach, VA May 4 2011
ACKNOWLEDGEMENTS • NASA Research Announcement under Topic A.3.6, “Rotorcraft Flight Dynamics and Control” • NASA: William Decker (COTR) and VMS Team • HOH AERONAUTICS: Dave Mitchell (PI) and Tom Nicoll • AMRDEC: Jeff Lusardi • ADVANCED ROTORCRAFT TECHNOLOGIES 67th Annual Forum of the American Helicopter Society
PRESENTATION OUTLINE • Introduction • Baseline & Added Dynamics • Time-varying Cutoff & Power Frequency • Piloted Simulation Description • Precision Hover Task Analysis • Conclusions 67th Annual Forum of the American Helicopter Society
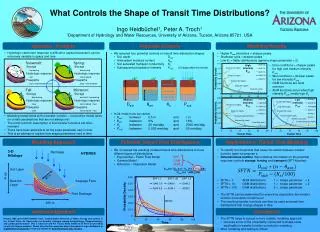
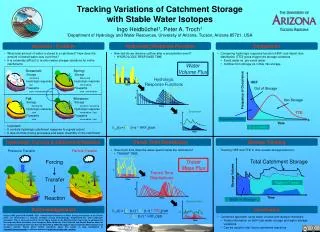
INTRODUCTION • The objective of this research program was to investigate pilot thresholds of detection as higher-order dynamics were introduced to a baseline rotorcraft model • The investigation took the form of a piloted simulation that was conducted in February 2009 using the NASA Ames Research Center Vertical Motion Simulator (VMS) • The focus of this paper is to assess the utility of time-varying cutoff and power frequency as a means of differentiating run-to-run and pilot-to-pilot differences in pilot-vehicle system behavior 67th Annual Forum of the American Helicopter Society
BASELINE ROTORCRAFT DYNAMICS • The baseline helicopter model used was a modified OH-6A with the cross coupling and higher order terms of the model removed. • Removing the cross coupling terms helped to insure that any changes seen in the dynamics of the helicopter by the pilot were due to the added dynamics only and not from potential cross-coupling. • The baseline rotorcraft dynamics represented uncoupled pitch and roll dynamics resulting in first order pitch and roll rate command systems. • The pitch and roll damping derivatives were set to provide one high and one low bandwidth configuration in each axis. • The simplified model was valid only for low speed and hover. 67th Annual Forum of the American Helicopter Society
ROTORCRAFT ADDED DYNAMICS • The added dynamics took the form of a second order lead/lag or lag/lead transfer function filter. • The filter was cascaded with the baseline rotorcraft dynamic model. • The gain, pole frequency, and zero frequency could all be varied individually. • The pole and numerator damping were set to the same initial value and were then varied together. • The added dynamics had the following form: 67th Annual Forum of the American Helicopter Society
NASA AMES VERTICAL MOTION SIMULATOR (VMS) FACILITY • The VMS features significant vertical and horizontal motion that makes the facility ideal for conducting low speed rotorcraft evaluation tasks. • The simulator cab was configured with standard rotorcraft controls (center cyclic, collective, and pedals) and displays for forward, side, and chin bubble windows NASA Photo & Illustration 67th Annual Forum of the American Helicopter Society
PRECISION HOVER TASK • The evaluation task used was the precision hover task as specified in ADS-33E-PRF. • The objective of the task is to evaluate the ability of the rotorcraft to transition from translating flight to a stable hover over a designated point, accurately and with adequate aggressiveness. NASA Photo 67th Annual Forum of the American Helicopter Society
EVALUATION PROCEDURES • The pilots were familiarized with the evaluation task using the baseline (no added dynamics) configuration. • Some adjusting of the lateral and longitudinal cyclic gains was made, if necessary, to ensure that the pilot felt comfortable with the baseline configuration such that the task performance was considered “good.” • The baseline configuration was often repeated to recalibrate the pilot to known “good” dynamics. • For an individual evaluation case, the pilot was given a unique zero/pole combination with a shared damping ratio. 67th Annual Forum of the American Helicopter Society
POST RUN PILOT QUESTIONS • At the conclusion of the task, the pilot was given the following three questions: • Did you notice the added dynamics? • If you noticed the added dynamics, did they affect the task? • If the added dynamics affected the task, did they improve or degrade task performance? • The damping ratio would then be changed based on the responses of the pilot to the above questions. • This process would be repeated until a more or less complete set of responses were achieved for that unique zero/pole pair. • A new zero/pole pair would then be introduced and the process would begin again, usually with the baseline configuration. 67th Annual Forum of the American Helicopter Society
PILOTED SIMULATION SUMMARY • The piloted simulation was conducted over a three week period in February 2009. • Five rotorcraft test pilots participated in the program resulting in over 1100 evaluation runs. • These runs consisted of many combinations of added dynamics in the pitch and roll axes with the added dynamics being introduced as both time-invariant and time-varying cases. • While the majority of runs were conducted with full VMS motion, a number of runs were conducted with no motion. • The full motion of the VMS was required, particularly for the higher frequency added dynamics cases. 67th Annual Forum of the American Helicopter Society
CLASSIC CUTOFF FREQUENCY • A spectral analysis method for determining the pilot operating frequency for pilot-in-the-loop flying tasks • An alternative measure when it is not possible to determine pilot-vehicle crossover frequency directly • A quantitative measure of pilot stick activity derived by examining controller input power versus frequency • Defined as the frequency at which the integral of the power spectral density (PSD) is half its total value 67th Annual Forum of the American Helicopter Society
TIME-VARYING CUTOFF FREQUENCY • Wavelets provide a means of calculating the time-varying power or auto spectrum, called a scalogram • Rather than using the auto spectrum averaged over the entire run, the time-varying cutoff frequency is calculated by numerically integrating the power over the frequency range for each time increment of the scalogram 67th Annual Forum of the American Helicopter Society
POWER FREQUENCY • A limitation of the time-varying cutoff frequency is the lack of a relationship to the magnitude of the power spectrum • This can result in a range of behavior that does not fully correlate to the time-varying behavior seen in the associated scalogram • The power frequency metric marries the two by multiplying the cutoff frequency by the peak magnitude at each time slice 67th Annual Forum of the American Helicopter Society
ANALYSIS: SELECTED ADDED DYNAMICS CASES 67th Annual Forum of the American Helicopter Society
ANALYSIS: Pilot A Time Histories = TV Lateral Cyclic Lateral Cyclic Baseline Roll Rate Roll Rate 67th Annual Forum of the American Helicopter Society
ANALYSIS: Pilot A Baseline Cutoff Frequency Scalogram Power Frequency Lateral Cyclic Roll Rate 67th Annual Forum of the American Helicopter Society
ANALYSIS: Pilot A Time-Varying Cutoff Frequency Scalogram Power Frequency Lateral Cyclic Roll Rate 67th Annual Forum of the American Helicopter Society
ANALYSIS: Pilot C Time Histories = TV Lateral Cyclic Lateral Cyclic Baseline Roll Rate Roll Rate 67th Annual Forum of the American Helicopter Society
ANALYSIS: Pilot C Baseline Cutoff Frequency Scalogram Power Frequency Lateral Cyclic Roll Rate 67th Annual Forum of the American Helicopter Society
ANALYSIS: Pilot C Time-Varying Cutoff Frequency Scalogram Power Frequency Lateral Cyclic Roll Rate 67th Annual Forum of the American Helicopter Society
ANALYSIS: Pilot D Time Histories = TV Lateral Cyclic Lateral Cyclic Baseline Roll Rate Roll Rate 67th Annual Forum of the American Helicopter Society
ANALYSIS: Pilot D Baseline Cutoff Frequency Scalogram Power Frequency Lateral Cyclic Roll Rate 67th Annual Forum of the American Helicopter Society
ANALYSIS: Pilot D Time-Varying Cutoff Frequency Scalogram Power Frequency Lateral Cyclic Roll Rate 67th Annual Forum of the American Helicopter Society
ANALYSIS SUMMARY Cutoff Frequency Power Frequency 67th Annual Forum of the American Helicopter Society
CONCLUSIONS • Time-varying power frequency provides a promising new means to differentiate run-to-run and pilot-to-pilot characteristics in pilot-vehicle system behavior for closed-loop tasks. • The dependence of the time-varying power frequency on the time, magnitude of the power spectra density, and the distribution of the power over the frequency range clearly show the effects of the change in dynamics and the transitions between phases of the task. • Time-varying cutoff frequency is a less clear measure of pilot effort. Without the dependence on the magnitude of the power in the scalograms, it is difficult to judge pilot effort and to extract clear differences between runs and pilots. 67th Annual Forum of the American Helicopter Society