Download

1 / 26
260 likes | 383 Views
Graphs All tree structures are hierarchical. This means that each node can only have one parent node. Trees can be used to store data which has a definite hierarchy; for example a family tree or a computer file system.

E N D
Graphs • All tree structures are hierarchical. This means that each node can only have one parent node. Trees can be used to store data which has a definite hierarchy; for example a family tree or a computer file system. • Some data need to have connections between items which do not fit into a hierarchy like this. Graph data structures can be useful in these situations. • A graph consists of a number of data items, each of which is called a vertex. Any vertex may be connected to any other, and these connections are called edges.
Extremely useful tool in modelling problems • Consist of: • Vertices • Edges Vertices can beconsidered “sites”or locations. Edges represent connections. D E C A F Graphs B Vertex Edge
Air flight system • Each vertex represents a city • Each edge represents a direct flight between two cities • A query on direct flights becomes a query on whether an edge exists • A query on how to get to a location is “does a path exist from A to B” • We can even associate costs to edges (weighted graphs), then ask “what is the cheapest path from A to B” Applications
Wireless communication • Can be represented by a weighted complete graph (every two vertices are connected by an edge). • Each edge represents the Euclidean distancedij between two stations. • Each station uses a certain power i to transmit messages. Given this power i, only a few nodes can be reached (bold edges). A station reachable by i then use its own power to relay the message to other stations not reachable by i. • A typical wireless communication problem is: how to broadcast between allstations such that they are all connected and the power consumption is minimized. Another application
Some other applications: • Electronic circuits: To find the least resistance between two nodes. • Computer networks: To find the smallest path between 2 computers. • Databases: To draw the entity relationship(ER) diagram.
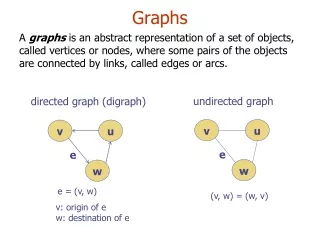
{a,b} {a,c} {b,d} {c,d} {b,e} {c,f} {e,f} • Undirected graph • An undirected graph is specified by an ordered pair (V,E), where V is the set of vertices and E is the set of edges Definition
If v1 and v2 are connected, they are said to be adjacent vertices • v1 and v2 are endpoints of the edge {v1, v2} • If an edge e is connected to v, then v is said to be incident on e. Also, the edge e is said to be incident on v. • {v1, v2} = {v2, v1}* Terminology *Later, we will talk about “directed graphs”, where edges have direction. Thismeans that {v1,v2} ≠ {v2,v1} . Directed graphs are drawn with arrows (called arcs) between edges. This means {A,B} only, not {B,A} A B
Two popular computer representations of a graph. Both represent the vertex set and the edge set, but in different ways. • Adjacency Matrix Use a 2D matrix to represent the graph • Adjacency List Use a 1D array of linked lists Graph Representation
2D array A[0..n-1, 0..n-1], where n is the number of vertices in the graph • Each row and column is indexed by the vertex id. • - e,g a=0, b=1, c=2, d=3, e=4 • An array entry A [i] [j] is equal to 1 if there is an edge connecting • vertices i and j. Otherwise, A [i] [j] is 0. • The storage requirement is Θ(n2). Not efficient if the graph has few edges. • We can detect in O(1) time whether two vertices are connected. Adjacency Matrix
The adjacency list is an array A[0..n-1] of lists, where n is the number of vertices in the graph. Each array entry is indexed by the vertex id (as with adjacency matrix) • The list A[i] stores the ids of the vertices adjacent to i. Adjacency list
0 1 2 3 4 5 6 7 8 9 0 0 0 0 0 0 0 0 0 0 1 0 8 1 0 0 1 1 0 0 0 1 0 1 2 0 1 0 0 1 0 0 0 1 0 2 9 3 0 1 0 0 1 1 0 0 0 0 1 4 0 0 1 1 0 0 0 0 0 0 7 3 5 0 0 0 1 0 0 1 0 0 0 6 4 6 0 0 0 0 0 1 0 1 0 0 5 7 0 1 0 0 0 0 1 0 0 0 8 1 0 1 0 0 0 0 0 0 1 9 0 1 0 0 0 0 0 0 1 0 Examples
8 0 0 2 3 7 9 1 8 2 1 4 8 3 1 4 5 2 9 4 2 3 1 5 3 6 7 3 5 7 6 6 4 7 1 6 5 8 0 2 9 9 1 8 Examples
Adjacency Lists • More compact than adjacency matrices if graph has few edges • Requires more time to find if an edge exists • Adjacency Matrix • Always require n2 space • This can waste a lot of space if the number of edges are sparse • Can quickly find if an edge exists Adjacency Lists vs. Matrix
A path is a sequence of vertices (v0, v1, v2,… vk) such that: • For 0 ≤ i < k, {vi, vi+1} is an edge • For 0 ≤ i < k-1, vi ≠ vi+2 That is, the edge {vi, vi+1} ≠ {vi+1, vi+2} Note: a path is allowed to go through the same vertex or the same edge any number of times! • The length of a path is the number of edges on the path Path between vertices
A path is simple if and only if it does not contain a vertex more than once. • A path is a cycle if and only if v0= vk • The beginning and end are the same vertex! • A path contains a cycle if some vertex appears twice or more Types of paths
Are these paths? Any cycles? What is the path’s length? {a,c,f,e} {a,b,d,c,f,e} {a, c, d, b, d, c, f, e} {a,c,d,b,a} {a,c,f,e,b,d,c,a} Examples
A graph is directed if direction is assigned to each edge. We call the directed edges arcs. • An edge is denoted as an ordered pair (u, v) • Recall: for an undirected graph • An edge is denoted {u,v}, which actually corresponds to two arcs (u,v) and (v,u) Directed Graph
A path in a directed graph must follow the direction of the arrows. • A directed graph is connected if, for any pair of vertices, there is a path between them. Is the above graph connected? D C E A
A directed path is a sequence of vertices (v0, v1, . . . , vk) • Such that (vi, vi+1) is an arc • A directed cycle is a directed path such that the first and last vertices are the same. • A directed graph is acyclic if it does not contain any directed cycles Directed Acyclic Graph
3 6 8 0 7 2 9 1 5 4 Indeg(2)? Indeg(8)? Outdeg(0)? Num of Edges? Total OutDeg? Total Indeg? Example
Directed graphs are often used to represent order-dependent tasks • That is we cannot start a task before another task finishes • We can model this task dependent constraint using arcs • An arc (i,j) means task j cannot start until task i is finished • Clearly, for the system not to hang, the graph must be acyclic. j i Directed Graphs Usage Task j cannot start until task i is finished
Self loops: An edge from an vertex to itself is called self loop. • A complete graph is a graph which has maximum number of edges. • For undirected graph with n vertices it is n(n-1)/2. • For directed graph it is n(n-1). • Subgraph of G(V,E): Is a graph G’ =(v’,e’) where v’is subset of V and e’ is subset of E. Other Definitions
Path: A path from vertex vi to vj is a sequence of vertices vi, vi1,vi2……vj such that <vi,vi1><vi1,vi2>…..<vin,vj> edges in the graph. • A simple path is a path in which all vertices except possibly the start and end are distinct. • A cycle is a simple path in which start and end vertex are same. • In an undirected graph two vertices vi and vj are said to be cnnected if there exists a path in G from vi to vj.
Connected graph: An undirected graph is called connected if for every pair of vertices vi and vj there exists a path from vi to vj. • A connected component of an undirected graph is the maximal connected subgraph. • Tree is an acyclic graph • Strongly connected graph:a directed graph is said to be strongly connected if for every pair of vertices vi and vj in V(G) there is a directed path between vi and vj and also from vj and vi.
Strongly connected component: • Is a maximal subgraph that is strongly connected. • Degree: degree of a vertex is number of edges incident on that vertex. • Indegree of v:Number of edges that has v as head in the directed graph. • Outdegree of v: Number of edges that has v as tail.