Download
1 / 36
360 likes | 451 Views
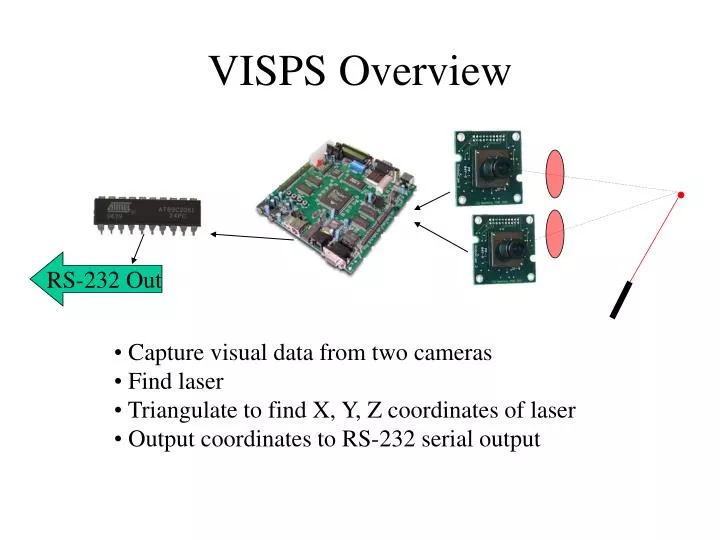
VISPS Overview. RS-232 Out. Capture visual data from two cameras Find laser Triangulate to find X, Y, Z coordinates of laser Output coordinates to RS-232 serial output. Talk Overview. VISPS goals and requirements – Cephas Design (Theory + Architecture) – Steve

E N D
VISPS Overview RS-232 Out • Capture visual data from two cameras • Find laser • Triangulate to find X, Y, Z coordinates of laser • Output coordinates to RS-232 serial output
Talk Overview • VISPS goals and requirements – Cephas • Design (Theory + Architecture) – Steve • Design (Details + Communication) – Cephas • Design analysis – Kevin • Issues and testing – Kevin • Schedule – Cephas • Conclusion – Cephas
VISPS Purpose GOAL • Produce X, Y, Z coordinates of laser marker relative to known reference frame Requirements, use: • 630-680nm laser pointer • 2 RC-2 black and white cameras • XSV300 Development Board • PIC Microcontroller
High Level Design Goals • Produce X, Y, Z from visual data • Simple interface • Easy to use • General, Accurate • Design headroom
Parameter Value Coordinate Accuracy @ 63 inches the coordinates will be within 0.1 inches of its true location. Data Output RS-232 Protocol (19.2 Kbps / 8 data bits / 1 stop bit / no parity) Voltage Requires 9 and 12 V supply Maximum Operating Distance 60 feet Laser Flare Wavelength 630-680 nm Laser Flare Max Output < 1 mW Requirements Table 3 – VISPS operating parameter
Constraints From Requirements • Code size on PIC C < 20kB • Enough pins on XSV300 for two cameras input and communication with PIC C
How Are Design Goals Achieved? • Mathematics and theory • Logical implementation and architecture • Implementation details and subsystem communication
Triangulation Problem Summary Top View Side View
Visual Data Left Camera Right Camera Pixel coordinates are available.
Pixel Distances • h is a constant 340 pixels at any distance
Math And Theory Summary • Y, and Z found Similar to X • Found X, Y, and Z using in terms of pixel coordinates • No trigonometry or complex math • No multiplication of error
Design Implementation • Goals (Output points at 30fps, Preserve design headroom) • Black Box design outline • Component design specifics and I/O details
Generic Red Filters • Remove non-laser light VISPS RS-232 Coordinate output • PIC µC • Compute angles from pixel data • Compute X, Y, Z from angles • Output coordinates using RS-232 protocol • RoboCam RC-2 • Deliver pixel data • XSV300 • Locate Marker in pixel data • Generic Laser Pointer • Project marker
Finding Center Of Marker First saturated point Average of coordinates Last saturated point
BUSY C1hi C1lo C2hi C2lo Rhi Rlo DATA XSV300-PIC Protocol NEW READY
Design Analysis • Goals met • Requirements satisfied • Error analysis • Lab results
Goals Met • The design will correctly produce X, Y, and Z coordinates. • We managed to avoid solutions that would have made using VISPS overly cumbersome or complicated. • VISPS can output points at a full 30 points per second, the same rate as the camera • Significant upgrades to VISPS accuracy from higher resolution cameras would not require a major design change
Requirements Satisfied • Reworking our math enabled us to fit all the needed code on the PIC C • With current cameras, VISPS is accurate to within 0.1 inches at 60 inches • Moving to XSV300 from XS40 gave us the extra I/O pins we needed
Error Sources and Analysis • Miscalibration of cameras • Camera alignment • Camera leveling • Camera resolution • Output resolution
Miscalibration Of Cameras • All our mathematics are based on initial measurements at Z = 160cm • Introduction of systematic error in Z if h does not really equal 340 pixels • Spend extra time taking careful measurements • Integer value for h is encouraging • Do sanity checks against manual measurements
Camera Alignment • All our mathematics are based on the assumption that the two cameras are perfectly parallel • Introduction of systematic error if cameras are not parallel • Measure D at a distance check
Camera Leveling • To know the reference frame for the X, Y, Z values produced, camera assembly must be perfectly leveled • Use bubble levels mounted on camera assembly • Do sanity checks against manual measurements
Camera Resolution • Pixel size increases with distance • Error is equal to ½ pixel width as a function of Z • This error is inherent in VISPS and cannot be reduced except by increasing camera resolution • Not bad. Even at 340ft, error only = 5.5 inches!
Output Resolution • Output is in tenths of inches • Not a factor after 63 inches • This error is inherent in VISPS • Error can be reduced by reducing the max output distance
Lab Results • Cameras filtered with red filter produce good, noise free data • Able to find laser marker quickly, accurately, and consistently • PIC C output shows that math is correct • Unable to test system accuracy until parts are integrated
Problem Areas and Testing • Resolved issues • Remaining issues • Reviewers comments • Testing
Resolved Issues • Noise filtering • Interfering light sources • Complex math and PIC C memory constraints
Remaining Issues • Porting FPGA design to XSV300 • System accuracy
Testing • Do lots of sanity checks against manual measurements • Test validity of math theories • Visually inspect VGA output of laser finding module and camera perspective • Logic analyzer to check FPGA output • Extra PIC C test environment for PIC C • View serial output on Microsoft Hyperterminal • Output using printf() to test X, Y, Z production independently of coordinate output protocol
Current Status And Roadmap Port FPGA Design to XSV300. Completed: • Find laser in visual data • Module to talk to PIC C • PIC C math • PIC C, FPGA and RS-232 I/O Remaining • Port FPGA design to XSV300 • Integrate components and test • Win32 App for demo Week 8 Integrate Components, test, and debug. Week 9 More debugging, test, demo. Week 10 VACATION
Conclusion And Summary • Our design will work • Design goals are met