Download
1 / 32
320 likes | 744 Views
EMG Lab Data Collection. Toru Tanaka, Miguel Narvaez, Adam Bruenger, and members of the Spring Semester KIN 831 Course. Worn about subject’s waist Receives incoming voltage signals (e.g., EMG, force transducers, metronome, electrogoniometer) 2 sets of 8 pairs of differential leads

E N D
EMG Lab Data Collection Toru Tanaka, Miguel Narvaez, Adam Bruenger, and members of the Spring Semester KIN 831 Course
Worn about subject’s waist • Receives incoming voltage signals (e.g., EMG, force transducers, metronome, electrogoniometer) • 2 sets of 8 pairs of differential leads • 1 common (ground) lead per set • 1 set of 8 DC differential channels • Amplifies incoming analog signals • 2 sets of pairs of 8 differential channels (gain set at 1, 2, 5, or 10 K) • 8 DC differential channels (gain set at 1, 1.333, 2, or 4 K) • Samples • Each of 16 differential channels at 8 KHz • Each of 8 DC differential channels at 1.6 KHz • Converts analog signals into digital signals • Transmits digital signal to receiver via fiber optic cable MYOPAC Belt Unit
MYOPAC Receiver Unit • Receives digital optical signals from MYOPAC belt unit • Converts digital signals back to analog signals • Makes signals available to suitable analog signal recording system (e.g., analog to digital converter, oscilloscope, computer) • Full scale output of receiver unit = 5 volts
Output of signal to computer Analog to digital converters of input signals
Calibration of Input Signals • EMG – signals amplified by selected gain (assume linear amplification of all signals) • Metronome – only temporal signal needed; not concerned for magnitude of signal • Electrogoniometer – check voltage output over range of angles expected; assume linearity of output signal • Torque – check torque value at expected maximum and minimum; assume linearity of output signal (see next slide)
Calibration of Torque Signal • Measure length of calibration bar from pivot to center of cross member (e.g., 0.765 m) • Level calibration bar • Load calibration bar with known mass (e.g., 40 kg 392.4 N) • Torque = force x perpendicular distance (e.g., 392.4 N x 0.765 m = 300.186 Nm) • Use volt meter to read output voltage for known torque (e.g., 5.31 volts) • Reorient calibration bar in vertical position • Output torque should = 0 volts (actual voltage = 0.01volts) • Calculate volts per unit of torque assuming linearity of output signal (e.g., 56.64 Nm per volt)
Identify Central Contractile Region of Muscles to be Tested • Use anatomical reference source • Apply resistance to prime movement of muscle while subject contracts muscle • Palpate muscle (e.g., rectus femoris) • Attempt to distinguish from other muscles in vicinity (e.g., vastus lateralis and vastus medialis) to reduce chance of cross talk
Prepare Skin for Surface Electrodes • Clean skin 2. Shave skin 3. Clean skin 4. Abrade skin 5. Clean skin
Position Surface Electrodes • Use pair of electrodes for common mode rejection • Determine position near belly of muscle to be recorded • Orient pair of electrodes with respect to line of pull of muscle and/or orientation of muscle fibers • For consistency, measure distance between recording surfaces
Prepare Additional Muscles for Surface Electrodes Medial head of gastrocnemius
Note the use of loop in electrode wires prior to taping leads and electrodes. This may protect electrode from dislodging if leads are pulled.
Prepare Additional Muscles for Surface Electrodes Long head of biceps femoris
Familiarize Subject with Test Environment Click here Restrict Extraneous Movements
Experiment 1 • Variation of Force of Isometric Knee Extension • Isokinetic dynamometer set at 0 degrees/second • Knee angle set at 45 degrees • 3 different isometric contractions: mild, intermediate, and forceful (subject attempts to maintain constant force throughout each contraction) • Record rectus femoris EMG, knee extension torque, and joint angle • All signal sampled at 2 KHz • 3 data files
Based on your knowledge of muscle mechanics and electrophysiology what would you expect?
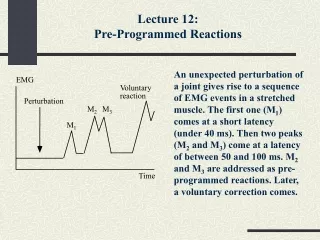
Experiment 2 • Electromechanical Delay (EMD) in Isometric Knee Flexion • Isokinetic dynamometer set at 0 degrees/second • Knee angle set at 45 degrees • Record long head of biceps femoris EMG • Signal sampled at 2 KHz • Subject begins with biceps femoris relaxed, turns muscle on quickly (quick contraction), holds contraction for approximately 3 seconds, then relaxes muscle quickly • Begin recording prior to contraction and end recording after turnoff of contraction • 1 data file
Based on your knowledge of muscle mechanics and electrophysiology what would you expect?
Experiment 3 • Concentric Isokinetic Knee Extension Under Different Loads and Angular Velocities • 3 angular velocities: 30, 90, and 120 degrees/second • 3 different isokinetic contractions: mild, intermediate, and forceful (subject attempts to maintain constant torque throughout each contraction) • Record rectus femoris EMG, knee extension torque, and joint angle • All signals sampled at 2 KHz • 9 data files
Video Clip from Experiment 3 Mild 30 deg/sec Mild 90 deg/sec Mild 120 deg/sec Intermediate 30 deg/sec Intermediate 90 deg/sec Intermediate 120 deg/sec Forceful 30 deg/sec Forceful 90 deg/sec Forceful 120 deg/sec
Based on your knowledge of muscle mechanics and electrophysiology what would you expect?
Eccentric Isokinetic Knee Extension Under Different Loads and Angular Velocities • 3 angular velocities: 30, 90, and 120 degrees/second • 3 different isokinetic contractions: mild, intermediate, and forceful (subject attempts to maintain constant torque throughout each contraction) • Record rectus femoris EMG and joint angle • All signal sampled at 2 KHz • 9 data files • *Note that recorded torque is the difference between applied torque by experimenter and resistive torque applied by subject (unknown value) Experiment 4
Video Clip from Experiment 4 30 degrees/sec mild, intermediate, forceful 90 degrees/sec mild, intermediate, forceful 120 degrees/sec mild, intermediate, forceful
Based on your knowledge of muscle mechanics and electrophysiology what would you expect?
Experiment 5 Concentric Versus Eccentric Contraction Under Similar and Different Loads and Angular Velocities *Note that data for this experiment was collected in Experiment 3 and Experiment 4
Based on your knowledge of muscle mechanics and electrophysiology what would you expect?
Skilled Movement Pattern Under Similar and Different Loads and Velocities • Subject performs “skilled” movement pattern consisting of standing from a seated position, holding position, going up onto the toes, holding position, coming down from toes, holding position, sitting back down on the chair, and holding position • Skilled movement pattern is performed under 3 load conditions (body only, body and bar (20 kg), and body and 60 kg • Subject performs skilled movement pattern under 3 frequencies (slow, intermediate, and fast) established by beat of metronome • EMG from rectus femoris, long head of biceps femoris, and medial head of gastrocnemius and metronome recorded at 2 KHz • 9 data files Experiment 6 A variation of Experiment 6 involves recording several repetitions of the skilled movement pattern to determine if there are changes with experience and learning
Video Clip from Experiment 6 “Skilled” Movement Pattern 20 Kg Bar Body Weight 60 Kg Load Slow speed Slow speed Slow speed Intermediate speed Intermediate speed Intermediate speed Fast speed Fast speed Fast speed
Based on your knowledge of muscle mechanics and electrophysiology what would you expect?
Experiment 7 • Fatigue Under Maximum Isometric Knee Extension • Subject attempts to hold maximum isometric knee extension until extensors greatly fatigued • EMG signal of rectus femoris recorded at 2 KHz during early, middle, and late phases of fatigue of muscle • Torque recorded to determine consistency and drop-off • Files of early, middle, and late phases of fatigue recorded
Video Clip from Experiment 7 Muscular Fatigue Start to middle of contractile period Near end of contractile period Fatigued
Based on your knowledge of muscle mechanics and electrophysiology what would you expect?