Download
1 / 22
220 likes | 284 Views
Explore types of motion in multi-particle bodies, formulation of problems, normal coordinates, diagonal terms, secular equations, and modern applications in vibrational spectroscopy with examples.

E N D
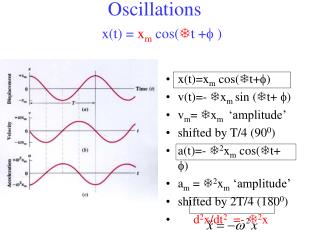
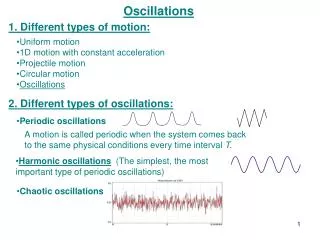
Types of motion • Each multi-particle body has different types of degrees of freedom: translational, rotational and oscillatory
6.1 • Formulation of the problem • Let us consider a many-particle Lagrangian • The system is stable, if each particle has a stable equilibrium position • We assume small deviations from equilibrium ηi
6.1 • Formulation of the problem • Kinetic energy of the system • Potential energy of the system
6.1 • Formulation of the problem • We assume that this term does not vanish • The Lagrangian of the system • Equations of motion
6.2 6.3 • Normal coordinates • We have a system of linear ordinary differential equations of the 2nd order • A natural choice of a trial solution • Equations of motion result in
6.2 6.3 • Normal coordinates • Let us consider diagonal terms l = k
6.2 6.3 • Normal coordinates • If real αand βare assumed to be some velocities, then this expression has a form of a kinetic energy, which is always positively defined • Thus if
6.2 6.3 • Normal coordinates • Equations of motion do not have exponentially growing solutions • This can be true only for two diagonal matrices • We have a freedom of normalization for matrix a; let us impose the following normalization: • Recall • Then
6.2 6.3 • Normal coordinates • Equations of motion : • We completely diagonalized our problem • We have a generalized eigen-value problem • Eigen-values of the problem are solutions of the secular equation: • Eigen-vectors:
6.2 6.3 • Normal coordinates • Secular equation • As the number of generalized coordinates increases, the power of the secular equation grows • For very large systems, there are two ways to calculate eigen-values: analytical application of the group theory and computer calculations • Modern applications: molecular vibrational spectroscopy, solid-state vibrational spectroscopy, etc.
6.4 • Example: longitudinal oscillations of a CO2 molecule • CO2 is a linear molecule; we will model it as follows: • The Lagrangian
6.4 • Example: longitudinal oscillations of a CO2 molecule • Secular equation:
6.4 • Example: longitudinal oscillations of a CO2 molecule • Eigen-vectors:
6.4 • Example: longitudinal oscillations of a CO2 molecule • Eigen-vectors:
6.4 • Example: longitudinal oscillations of a CO2 molecule • Normal coordinates:
6.5 • Forced oscillations • For open systems, we introduce generalized forces • For each generalized coordinate, there is a component of a force • We can introduce modified generalized forces for each normal coordinate • Total work done • Equations of motion:
6.5 • Forced oscillations • Let us consider a periodic external force • We look for a solution in the following form: • After substitution into the equation of motion • For generalized coordinates • Resonance
6.2 6.3 Normal coordinates
6.1 • The independent coordinates of a rigid body • Let us consider a many-particle Lagrangian • The system is stable, if each particle has a stable equilibrium position • We assume small deviations from equilibrium
6.1 • The independent coordinates of a rigid body • Let us consider a many-particle Lagrangian • The system is stable, if each particle has a stable equilibrium position