Download
1 / 32
410 likes | 1.43k Views
17. Group Theory. Introduction to Group Theory Representation of Groups Symmetry & Physics Discrete Groups Direct Products Symmetric Groups Continuous Groups Lorentz Group Lorentz Covariance of Maxwell’s Equations Space Groups. 1. Introduction to Group Theory. Symmetry :

E N D
17. Group Theory Introduction to Group Theory Representation of Groups Symmetry & Physics Discrete Groups Direct Products Symmetric Groups Continuous Groups Lorentz Group Lorentz Covariance of Maxwell’s Equations Space Groups
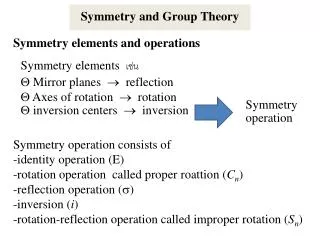
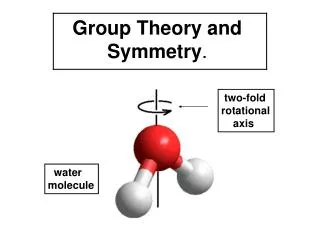
1. Introduction to Group Theory • Symmetry : • Spatial symmetry of crystals ~ X-ray diffraction patterns. • Spatial symmetry of molecules ~ Selection rules in vibrational spectra. • Symmetry of periodic systems ~ e-properties: energy bands, conductivity, … Invariance under transformations : Linear displacement ~ Conservation of (linear) momentum. Rotation ~ Conservation of angular momentum. Between (inertial) frames ~ General (special) relativity. Theories of elementary particles begin with symmetries & conservation laws. Group theory was invented to handle symmetries & invariance.
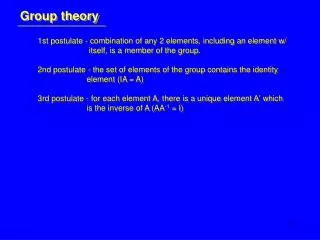
Definition of a Group Refs: W.K.Tung, “Group Theory in Physics” (85) M.Tinkham, “Group Theory & QM” (64) A group{ G, } is a set G with a multiplication such that a, b, c G , 1. Closure 2. Associativity 3. Identity 4. Inverse Group { G, } is usually called simply group G and a b, ab. • Two easily proved theorems : • Every a1is unique. • Rearrangement theorem
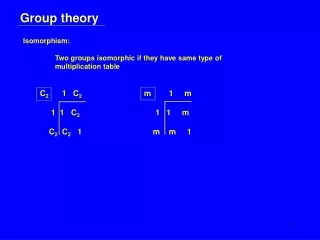
More Definitions Finite group : Group with a finite number n of elements. n =order of the group. Discrete group : 1-1 map between set G & a subset of the natural number. ( label of elements of G is discrete ) Continuous group with n-parameter: 1-1 map between set G & subset ofRn. Abelian group : is commutative, i.e., Cyclic groupCnof order n: Cnis abelian Group {G, }is homomorphic to group { H , } : a map f: G H that preserves multiplications, i.e., If f is 1-1 onto ( f1 exists ), then {G, }and { H , } are isomorphic. Subgroup of group {G, } : Subset of G that is closed under .
Example 17.1.1. D3 Symmetry of an Equilateral Triangle Table of gi gj for D3 gj gi Subgroups : Dihedral group Mathematica
Example 17.1.2. Rotation of a Circular Disk Rotation in x-y plane by angle : 1-D continuous abelian group.
Example 17.1.3. An Abstarct Group An abstract group is defined by its multiplication table alone. Vierergruppe (4-group) :
Example 17.1.4. Isomorphism & Homomorphism: C4 C4 = Group of symmetry operations of a square that can’t be flipped. abelian C4 & G are isomorphic. Subgroup:
2. Representation of Groups A representation of a group is a set of linear transformations on a vector space that obey the same multiplication table as the group. Matrix representation : Representation in which the linear transformations tak the form of invertible matrices ( done by choosing a particular basis for the vector space ). Unitary representation : Representation by unitary matrices. Every matrix representation is isomorphic to a unitary reprsentation.
Example 17.2.1. A Unitary Representation Unitary representations for :
More Definitions & Properties A representation U(G) is faithful if U(G) is isomorphic to G. Every group has a trivial representation with Let U(G) be a representation of G, then is also a representation. W(G) & U(G) are equivalent representations : A representation U(G) is reducible if everyU(g) is equivalent to the sameblock diagonal form, i.e., for some We then write : W1 A representation U(G) is irreducible if it is not reducible. W2 Commuting matrices can be simultaneously digonalized All irreducible representations (IRs) of an abelian group are 1-D.
Example 17.2.2. A Reducible Representation A reducible representation for : Using & , we get the equivalent block diagonal form
Example 17.2.3. Representations of a Continuous Group Symmetry of a circular disk : G is abelian R is reducible. Let & Independent IRs : Only U1 & U1are faithful.
3. Symmetry & Physics Let R be a tranformation operator such as rotation or translation. i.e., is the tranformed hamiltonian & is the transformed wave function If H is invariant under R : i.e., is also an eigenfunction with eigenvalue E. possibility of degeneracy. Actual degeneracy depends on the symmetry group of H& can be calculated, without solving the Schrodinger eq., by means of the representation theory .
Starting with any function, we can generate a set Next, we orthonormalize S using, say, the Gram-Schmidt scheme, to get = basis that spans an d –D space. Or, in matrix form : i.e., is a representation of G on the space spanned by .
Starting with any function, we can generate a basis for a d-D representation for G. Uis in general reducible, i.e., where m= number of blocks equivalent to the same IR U (). w.r.t. a basis for an IR of G. ( Shur’s lemma ) If is an eigenfunction of H, then U is an IR. For arbitary , we can take one state from each U ()block to get a basis to set up a matrix eigen-equation of H to calculate E.
multiplication table Example 17.3.1. An Even H His even in x Let be the operator then IR Cs is abelian All IRs are 1-D. For an arbitrary (x) : Mathematica Even Odd = basis for W
Generation of IR Basis Using Schur’s lemma, one can show that (Tung, §4.2) where P( ) = projector onto the space of unitary IR U( ). ( ) (g) = Character (trace) of U( ) (g) . n = dimension of IR. nG = order of G. R(g) = operator corresponding to g. For any f (x), , if not empty, is the ith basis vector for the IR U( ). , if not empty, is a basis vector for the IR U( ).
Example 17.3.2.QM: Triangular Symmetry 3 atoms at vertices Riof an equilaterial triangle : Starting with atomic s-wave function (r1) at R1:
4. Discrete Groups Classes : For any a G, the set is called a class of G. C is usually identified by one of its elements. Rearrangement theorem A class can be generated by any one of its members. ( a can be any member of C ).
Example 17.4.1. Classes of D3 Table of ga g1for D3 a g Classes of D3are : Usually denoted as Mathematica All members of a class have the same character(trace). Orthogonality relations : Dimensionality theorem :
Normalized full representation table of D3 : Take each row (column) as vector : They’re all orthonormalized. Sum over column (row) then gives the completeness condition.
Example 17.4.2. Orthogonality Relations: D3 D3 row orthogonality A1 , E: Character table of D3 Mathematica E , E: Completeness C3 , C2: C3 , C3:
Example 17.4.3. Counting IRs multiplication table C4 Table of gb g1for C4 b g Character table C4