Download
1 / 47
470 likes | 606 Views
Nuclear Stockpile Stewardship and Bayesian Image Analysis (DARHT and the BIE) (U). By James L. Carroll Jan 2011 LA-UR 11-00201. Abstract.

E N D
Nuclear Stockpile Stewardship and Bayesian Image Analysis (DARHT and the BIE) (U) By James L. Carroll Jan 2011 LA-UR 11-00201
Abstract • Since the end of nuclear testing, the reliability of our nation’s nuclear weapon stockpile has been performed using sub-critical hydrodynamic testing. These tests involve some pretty “extreme” radiography. We will be discussing the challenges and solutions to these problems provided by DARHT (the world’s premiere hydrodynamic testing facility) and the BIE or Bayesian Inference Engine (a powerful radiography analysis software tool). We will discuss the application of Bayesian image analysis techniques to this important and difficult problem. (U)
Talk Outline • Stockpile Stewardship • DARHT • Bayesian Image Analysis • BIE
Nuclear Weapons 101 • Nuclear weapons are comprised of • Primary • Secondary • Radiation Case • Delivery Packaging • Primary Pit: • Sub-critical fissile mass surrounded by HE. • Implosion creates super critical mass. • Chain reaction energy and radiation “initiate” the secondary.
Testing Nuclear Weapons: Atmospheric Testing July 16, 1945 (Trinity) – 1963 (Limited Test Ban Treaty) Underground Testing 1963 (Limited Test Ban Treaty) – 1992 (last critical US nuclear test)
Sub-Critical Nuclear Testing • Radiographic images from sub-critical testing help ensure the credibility of our enduring nuclear weapon stockpile. • Evaluating effects of aging on materials • Fine tuning computer modeling of weapon performance and behavior. • Evaluating re-manufactured components. • Certification of existing weapon systems in stockpile.
What is Hydrodynamic Testing? • High Explosives (HE) driven experiments to study nuclear weapon primary implosions. • Radiographs of chosen instants during dynamic conditions. • Metals and other materials flow like liquids under high temperatures and pressures produced by HE. Static Cylinder Set-up Static Cylinder shot Static Cylinder Radiograph
The challenge of imaging the pit: • Spot size • Motion blur • Scatter • Dose • Noise • Poisson events • Camera • Cosmic rays • Tilt/Cone Effects
Challenges Spot size:
Challenges Motion blur:
Challenges Scatter:
Challenges: Dose
Challenges Dose Graded collimator
England: Moguls United States: FXR United States: PHERMEX Russia: BIM-M France: AIRIX
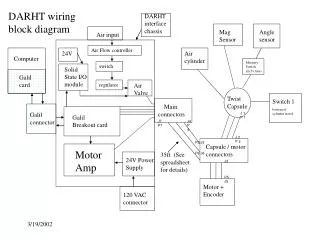
Firing Point DARHT: Phase 2: “Second Axis” Optics and Detector Bunker Lab Space and Control Rooms Phase 1: “First Axis”
DARHT • Two linear induction accelerators at right anglesproduce extremely powerful and tight electron beams • Metal target stops electronsand makes x-rays with a very small spot size • Scintillator converts x-rays to visible light • Light is captured by specialized cameras • Axis 2 can be “pulsed” to produce four separate “dynamic”images
DARHT Accelerator Principles of Operation The DARHT accelerators use pulsed power sources to produce and accelerate a single electron beam pulse. DARHT Axis 2 chops the beam into 4 pulses just before the target. The two machines use different pulse power technology DARHT Axis 1 Accelerator • 60-ns, 2-kA, 19.8-MeV electron beam for single pulse radiography. • Linear Induction Accelerator with ferrite cores and Blumlein pulsed power. • The injector uses a capacitor bank and a Blumlein at 4-MV. • Cold velvet cathode. • Single 60 ns pulse. • Operation began in July 1999. DARHT Axis 2 Accelerator • 2-ms, 2-kA, 18.4-MeV electron beam • for 4-pulse radiography. • Linear Induction Accelerator with wound Metglass cores and Pulse Forming Networks (PFNs) . • The Injector uses a MARX bank with 88 type E PFN stages at 3.2 MV. • Thermionic cathode. • 4 micropulses - variable pulse width. • Operations began in 2008.
A forward modeling approach is currently used in analysis of (single-time) radiographic data True radiographic physics ? Inverse approach (approximate physics) True density (unknown) Transmission (experimental)
A forward modeling approach is currently used in analysis of (single-time) radiographic data True radiographic physics ? How do we extract density from this transmission? Inverse approach (approximate physics) True density (unknown) Transmission (experimental)
A forward modeling approach is currently used in analysis of (single-time) radiographic data True radiographic physics ? How do we extract density from this transmission? Inverse approach (approximate physics) True density (unknown) Compare statistically Transmission (experimental) Simulated radiographic physics Model density (allowed to vary) Transmission (simulated)
A forward modeling approach is currently used in analysis of (single-time) radiographic data True radiographic physics ? How do we extract density from this transmission? Inverse approach (approximate physics) True density (unknown) Compare statistically Transmission (experimental) Simulated radiographic physics We develop a parameterized model of the density (parameters here might be edge locations, density values) Model density (allowed to vary) Transmission (simulated)
A forward modeling approach is currently used in analysis of (single-time) radiographic data True radiographic physics ? How do we extract density from this transmission? Inverse approach (approximate physics) True density (unknown) Compare statistically Transmission (experimental) Simulated radiographic physics We develop a parameterized model of the density (parameters here might be edge locations, density values) Model density (allowed to vary) Transmission (simulated) Model parameters are varied so that the simulated radiograph matches the experiment
A forward modeling approach is currently used in analysis of (single-time) radiographic data True radiographic physics ? How do we extract density from this transmission? Inverse approach (approximate physics) True density (unknown) Compare statistically Transmission (experimental) Simulated radiographic physics p(m|r) h(m) We develop a parameterized model of the density (parameters here might be edge locations, density values) Model density (allowed to vary) Transmission (simulated) Model parameters are varied so that the simulated radiograph matches the experiment
Assumptions • Where n is some independent , additive noise. • If n is Gaussian then:
Plug that in: • If I assume a uniform prior then:
A forward modeling approach is currently used in analysis of (single-time) radiographic data True radiographic physics ? How do we extract density from this transmission? Inverse approach (approximate physics) True density (unknown) Compare statistically Transmission (experimental) Simulated radiographic physics p(m|r) h(m) We develop a parameterized model of the density (parameters here might be edge locations, density values) Model density (allowed to vary) Transmission (simulated) Model parameters are varied so that the simulated radiograph matches the experiment
The Solution • Building h(m) • Optimizing parameters m
Using the Prior • Computer vision is notoriously under constrained. • Penalty terms on the function to be optimized can often overcome this problem. • These terms can be seen as ill-posed priors • GGMRF
BIE • A programming language to express h(m) • Graphical • Reactive • Interactive
The forward-modeling framework makes possible a global optimization procedure Now, physics-based constraints on the evolution of the time-series data will also constrain the (global) solution Prior knowledge provides additional constraints at each time t1 t2 t3 t4 SOLUTION:Evaluated Density DATA: Transmission (experiment) Data constrain solution at each time t1 t2 t3 t4
t5 t4 t3 t2 t1 time These physics-based constraints will maximize information extracted from each dataset Concept: Can we learn something about the solution at time 3 (blue) from the data at surrounding times? Approach: use physics to constrain solution at each time based upon time-series of data. WHEN WILL THIS APPROACH HAVE GREATEST VALUE? When certain conditions are met: 1) Must have the time between measurements (Dt) on the order of a relevant time scale of the flow; and 2) Must have non-perfect data (due to noise, background levels, etc). Consider an evolving interface: Data must be correlated in time! Perfect data would be the only required constraint… (Noisier data means the global optimization adds more value).
Statistical Improvements • Hypothesis testing. • Uncertainty estimation.