Download
1 / 53
530 likes | 555 Views
Dive into the world of vectors with clear explanations of direction ratios, cosines, and products, along with practical examples and exercises. Covers vector addition, projections, and line equations in 3D space.

E N D
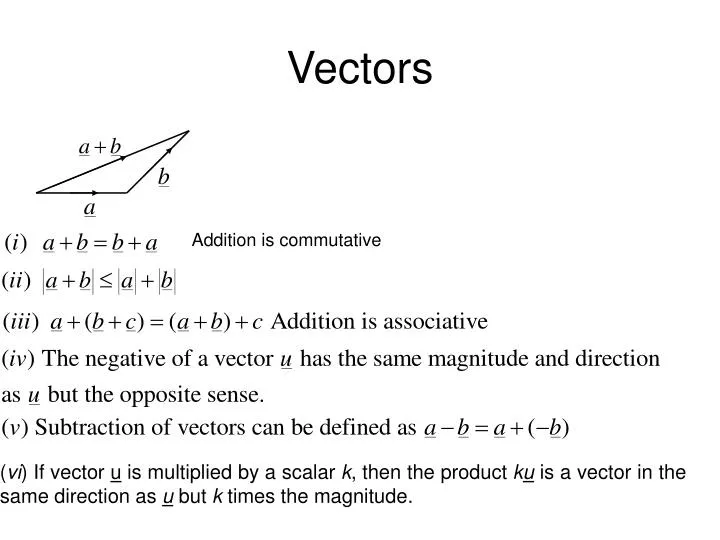
Vectors Addition is commutative (vi) If vector u is multiplied by a scalar k, then the product ku is a vector in the same direction as u but k times the magnitude.
Vector Directions Hold your right hand out in front of you as if to shake hands
A unit vector is a vector of magnitude 1. Unit vectors in the x direction, y direction and z direction are denoted i, j and k. Any vector can be expressed in terms of i, j and k for example;
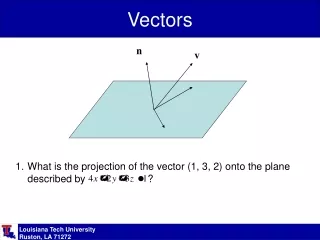
P Q P’ Q’ P The projection of a point P on a plane is the point P’, at the foot of the perpendicular to the plane passing through P. P’ The projection of a line PQ on a plane is the line P’Q’, which joins the projections of P ands Q on the plane The angle between a line and a plane , is the angle between the line and its projection on the plane. (degrees or radians)
Direction Ratios Any scalar multiple of a has the same direction but not necessarily the same sense as a. It follows that the ratio a1:a2:a3 can be used to describe uniquely the direction ratio of the vector. If two vectors have equal direction ratios then they are parallel.
Direction Cosines These components are called the direction cosines of a
Find (a) the direction ratio (b) the direction cosines of the vector a = 6i + 8j +24k
Page 44 Exercise 1 Questions 6 – 8 Page 46 Exercise 2 Questions 1, 2, 9 TJ Exercise 1
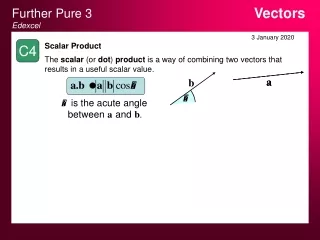
The Vector Product Two vectors can be combined by the binary operation, the scalar product, to produce a number (or scalar). It is also possible to define an operation where two vectors, a and b, multiply to produce a vector. This is referred to as the vector product, or cross product, as denoted a× b. Any two non parallel vectors, a and b, define a plane. Let n be a unit vector perpendicular to this plane (a normal) so that a, b and n form a right handed system.
u a b Any two non parallel vectors, a and b, define a plane. Let n be a unit vector perpendicular to this plane (a normal) so that a, b and n form a right handed system. a along the fingers b from the palm n along the thumb. The angle between a and b need NOT be 900 The vector product is defined as where is the angle between the positive directions of a and b. If either a = 0, or b = 0, then n is not defined and a× b is defined as 0.
The following properties follow directly from the definition.
b 600 a The vector product is distributive over addition. and Same magnitude but different sense. (see page 48)
Component form of the Vector Product Using the distributive law:
This is normally written as: We do this so as to use the following shortcut notation
B C A Calculate the area of a triangle whose vertices are A(2, -1, 3), B(5, -1, 2), C(2, 3, 4)
Calculate the shortest distance from the point P(1, 2, 3) to the straight line passing through the points A(1, 3, -2) and B(2, 2, -1) P B P’ A
The Scalar Triple Product A parallelopiped is a region of 3D space bounded by three pairs of parallel lines. Its volume can be calculated by multiplying the area of one plane in a pair and the perpendicular distance between the planes. V = Ah a h b c Suppose that the parallelopiped is defined by three vectors a, b and c which form a right handed system! Now any of the 3 pairs of parallel planes could have been used.
Now any of the 3 pairs of parallel planes could have been used. NOTE:
Page 52 Exercise 4 TJ Exercise 2
P L A p a u O Equation of a line in 3 dimensions A line in space is completely determined when we know the direction in which it runs and we know a point on the line. Its direction is unambiguously described by stating a vector parallel to the line. Such a vector is known as a position vector. Consider the line L which passes through the point A(x1, y1, z1) with direction vector u = ai + bj + ck. Let P(x, y, z) be any point on the line L. 1
P L A p a u O Consider the line L which passes through the point A(x1, y1, z1) with direction vector u = ai + bj + ck. Let P(x, y, z) be any point on the line L. 1 Giving 2 3 Also:
We have three form of the equation of a line in space. Equation 1 is known as the vector equation. The system of equations (2) is the parametric form. (t being the parameter). The system of equations (3) is the symmetric form. (also referred to as the standard or canonical form) • ‘t’ is often omitted in the symmetric form but has to be inserted to convert to other forms. • If any of the components of the direction vector is zero then some parts of the symmetric form will be undefined in which case the parametric form is better. • Each point on L is uniquely associated with a value of the parameter t. • The equation of a particular line is NOT unique. Both equations represent a line that passes through (3, 2, 2) and is parallel to i + 2j + 3k.
Write down the symmetric form of the equations of the line which passes through (1, -2, 8) and is parallel to 3i + 5j + 11k. • (b) Does the point (-2, -7, -3) lie on the line? (a) Direct substitution gives: (b) Substituting (-2, -7, -3) we get: Since the results are consistent (-1), the point lies on the line.
Find the equations of the line passing through A(2, 1, 3) and B(3, 4, 5) Since the line passes through A we get: Page 66 Exercise 9A Questions 1(a), (b), 2(a), 3(a), (c), (e) and 5 Page 67 Exercise 9B Question 2 TJ Exercise 3
The Equation of a Plane A plane in space can be uniquely identified if: • 3 points on the plane are known • 2 Lines on the plane are known • 1 point on the plane and a normal to the plane are known
a P Q Since both a and Q are fixed a.q is a constant on the plane.
Let k = a . q then If we know the normal a and any point P we can easily compute k This is the equation of the plane • To find the equation of a plane we must be able to reduce given data to • The components of a suitable normal vector • A point on the plane
P, Q, R and S are the points (1, 2, 3), (2, 1, -4), (1, 1, 1) and (7, -6, 5) respectively. • Find the equation of the plane perpendicular to PQ which contains the point P • which of the other points lie on the plane?
Find the equation of the plane which passes through the points A(-2, 1, 2) B(0, 2, 5) ans C(2, -1, 3). Strategy: Find a Normal to the plane. Using Point A to find k
Vector Equation of a plane R This is known as the vector equation of a plane. Where A is a point on the plane, and b and c are vectors parallel to the plane.
Find the equation of the plane, in vector form, which contains the points A(1, 2, -1), B(-2, 3, 2) and C(4, 5, 2). • Find the point on the plane corresponding to the parameter values t=2, u=3
We see that the point (2, 1, 3) lies in the plane and are vectors lying in the plane. Expressed in component form
Hence a vector normal to the plane is Using the point (2, 1, 3) to find k,
Page 57 Exercise 6 Questions 1, a, b, 2a, 3, 4a, c, 5a, 9, 10 Page 63 Exercise 8 As many as you can manage (A/B) TJ Exercise 4
Intersection of 2 lines • Two lines in space can be • Parallel • Intersect at a point • Skew. (not parallel but never intersect) Strategy for finding the point of Intersection of two lines • Express the equations of the lines in parametric form using parameters t1 and t2 • Equate the corresponding expressions for x, y and z producing 3 equations in two unknowns • Use two of the equations to find the values of t1 and t2 • Substitute these values into the third equation. If they satisfy then the point of intersection has been found. If not, then the lines do not intersect.
1 2 3 Equating: Using parameters t1 and t2; Substituting these values into equation 3 shows that they satisfy the equation. Hence the lines intersect. (2, 1, -3)
π2 A B C π1 Angle between two planes The angle between two planes can be constructed by picking any point B on the line of intersection of the planes and drawing perpendiculars to the line BA and BC on both planes. The angle ABC is the required angle. Viewing from P along the line of intersection we can see that the angle ABC is the same as the angle between the normal.
Find the angle between the planes with equations, x + 2y + z = 5 and x + y = 0.
Page 70 Exercise 11 Questions 1 and 2 Page 59 Exercise 7A Questions 1, 2 and 3 TJ Exercise 5 questions 1 and 2
90- u a Angle between a line and a plane Is the compliment of the angle between the line and the normal to the plane Use modulus since <90 • Strategy • Change the equation of the line to parametric form if necessary. • Substitute x y and z into the equation of the plane. • Solve this subsequent equation to obtain a value of the parameter, t, and hence the coordinates of the point of intersection.
Page 68 Exercise 10 Questions 1, 2, 3, 4 TJ Exercise 5 Question 3