Download
1 / 3
30 likes | 229 Views
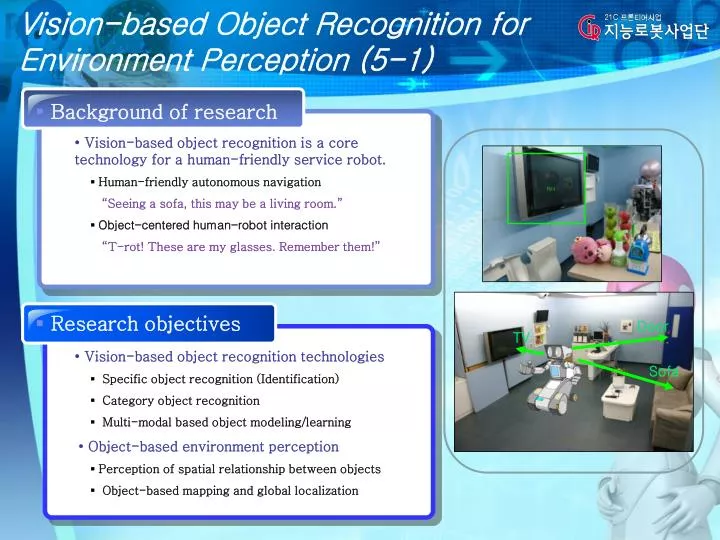
Vision-based Object Recognition for Environment Perception (5-1). Background of research. • Vision-based object recognition is a core technology for a human-friendly service robot. ▪ Human-friendly autonomous navigation “Seeing a sofa, this may be a living room.”

E N D
Vision-based Object Recognition for Environment Perception(5-1) • Background of research • • Vision-based object recognition is a core technology for a human-friendly service robot. • ▪ Human-friendly autonomous navigation • “Seeing a sofa, this may be a living room.” • ▪ Object-centered human-robot interaction • “T-rot! These are my glasses. Remember them!” Door • Research objectives TV • Vision-based object recognition technologies ▪ Specific object recognition (Identification) ▪ Category object recognition ▪Multi-modal based object modeling/learning • Object-based environment perception ▪ Perceptionof spatial relationship between objects ▪ Object-based mapping and global localization Sofa
Vision-based Object Recognition for Environment Perception(5-1) (1-3) 상호작용 Object verification Object Modeler Object Learner • Research contents • Specific/Category object recognition ▪ LIF+Contour Fragment / Spectral Matching • Multi-modal based object modeling/learning ▪SFM/handgesture + voice + category OR • Perception spatial relationship between objects ▪Ontology + Stereo depth + Object recognition • Object-based mapping and global localization ▪object + topology map/ 2-view based localization “Register this pencil sharpener!” Task : Register(PS) Human Detector Object Detector
Project Leader Sung-Kee Park Senior Research Scientist, Center for Cognitive Robotics Research Korea Institute of Science and Technology (KIST) skee@kist.re.kr Research Institutes : KIST Researchers : 12 (KIST)