Download
1 / 9
90 likes | 102 Views
Innovating near-real-time remote underwater target detection using moving sensor fields with sonobuoys. Synthetic data validation for SL algorithms in source and sensors location. Analysis of various detection scenarios.

E N D
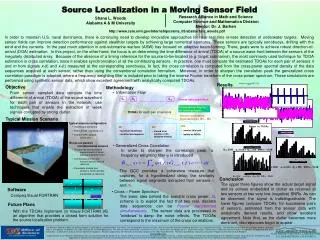
Source Localization in a Moving Sensor Field Shana L. Woods Computing and Computational Sciences Mentor: Dr. Barhen Jacob
Overview • In order to maintain U.S. naval dominance, there is continuing need to develop innovative approaches for near-real-time remote detection of underwater targets. • Moving sensor fields can improve detection performance against stealthier targets using large distributed sensor arrays. These sensors are typically sonobuoys, drifting with the wind and the currents.
Typical Mission Scenario • Submerged submarine • Patrol aircraft searching for it • A filed of GPS capable sonbuoys In which the buoys are passive omindirectional sensors • That provide sound pressure measurements of target signal and ambient noise. • Continuously monitor and transmit sensed data via radio link. • Perdiodically sample their positons, which are also transmitted via radio link. Patrol aircraft monitoring GPS-capable sonobuoys.
Source and Sensors Location Synthetic data are generated to validate the correct implementation of the SL algorithms x-y plane projection x-z plane projection
Results • Compared the effects of different situations i.e. amplitude, pulses and interval lengths.