Download
1 / 1
10 likes | 128 Views
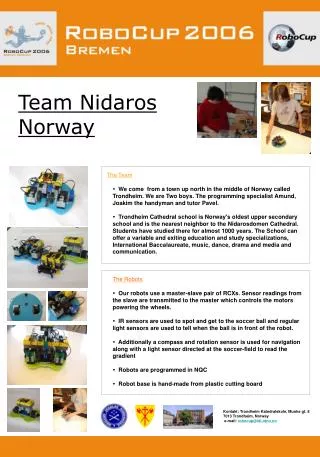
Team Nidaros Norway. Hadrware: We use robots built from LEGO Mindstorms / ROBOLAB with plastic base. Each robot is controlled by two RCXs (the pictures show our earlier prototypes) Sensors: RoboBall IR sensors, 2 types (Wiltronics) Compass Sensor (Hitechnic.com)

E N D
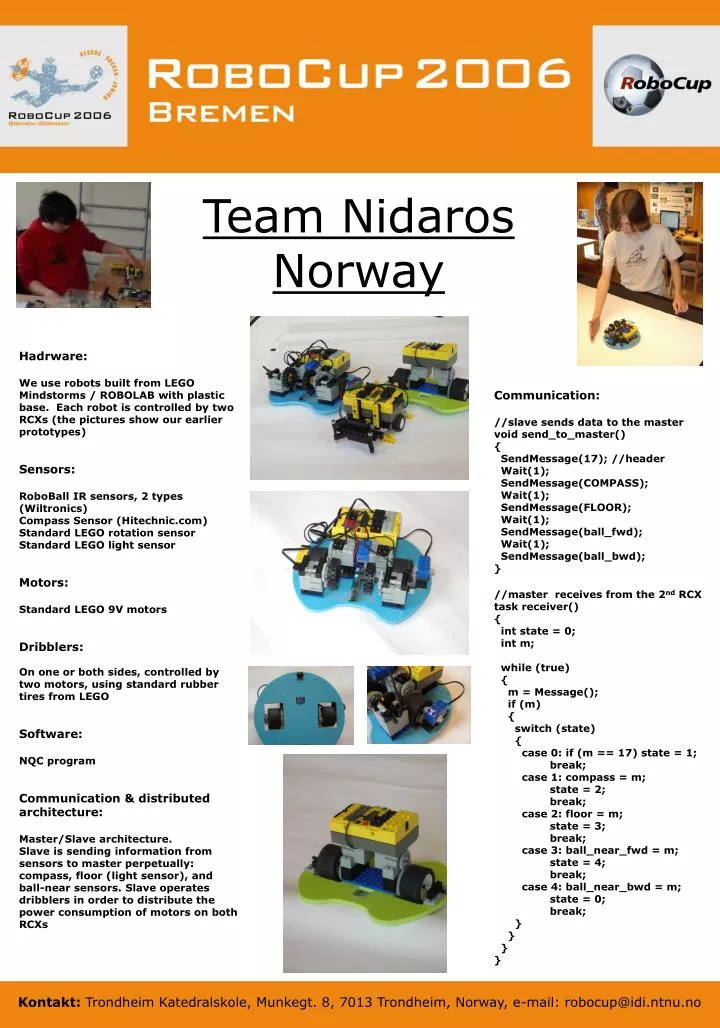
Team Nidaros Norway Hadrware: We use robots built from LEGO Mindstorms / ROBOLAB with plastic base. Each robot is controlled by two RCXs (the pictures show our earlier prototypes) Sensors: RoboBall IR sensors, 2 types (Wiltronics) Compass Sensor (Hitechnic.com) Standard LEGO rotation sensor Standard LEGO light sensor Motors: Standard LEGO 9V motors Dribblers: On one or both sides, controlled by two motors, using standard rubber tires from LEGO Software: NQC program Communication & distributed architecture: Master/Slave architecture. Slave is sending information from sensors to master perpetually: compass, floor (light sensor), and ball-near sensors. Slave operates dribblers in order to distribute the power consumption of motors on both RCXs Communication: //slave sends data to the master void send_to_master() { SendMessage(17); //header Wait(1); SendMessage(COMPASS); Wait(1); SendMessage(FLOOR); Wait(1); SendMessage(ball_fwd); Wait(1); SendMessage(ball_bwd); } //master receives from the 2nd RCX task receiver() { int state = 0; int m; while (true) { m = Message(); if (m) { switch (state) { case 0: if (m == 17) state = 1; break; case 1: compass = m; state = 2; break; case 2: floor = m; state = 3; break; case 3: ball_near_fwd = m; state = 4; break; case 4: ball_near_bwd = m; state = 0; break; } } } } Kontakt: Trondheim Katedralskole, Munkegt. 8, 7013 Trondheim, Norway, e-mail: robocup@idi.ntnu.no