Download
1 / 12
120 likes | 342 Views
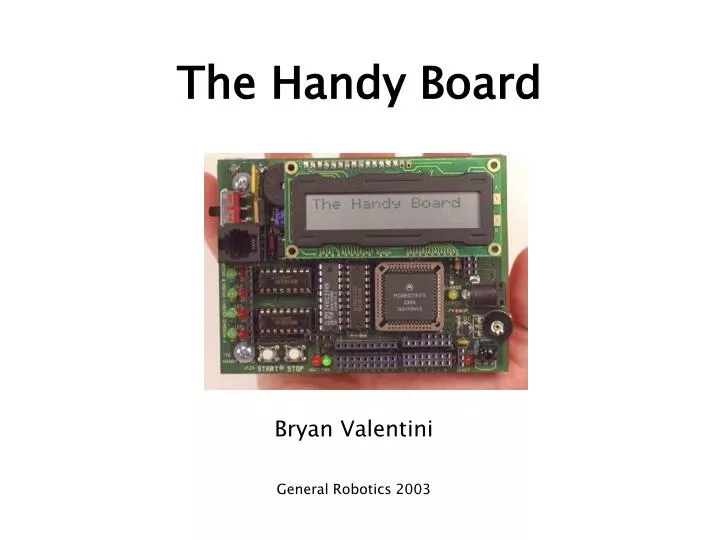
The Handy Board. Bryan Valentini General Robotics 2003. Overview. What is the Handy Board? The Anatomy of the Handy Board The HB and Interactive C Care and Tips Mantra: Charge your batteries before Demo. What is the Handy Board?. Battery powered microcontroller

E N D
The Handy Board Bryan Valentini General Robotics 2003
Overview • What is the Handy Board? • The Anatomy of the Handy Board • The HB and Interactive C • Care and Tips Mantra: Charge your batteries before Demo
What is the Handy Board? • Battery powered microcontroller • Capable of handling up to 4 DC motors (output) • Can read several sensors (input) • Re-chargeable • Re-programmable • Static Memory • Serial comm./IC allows for real-time interaction (USAR)
HB Features • 16x2 char LCD • Beating Heart • Two methods for Charging (important!) • Analog/Digital Input
HB Features • SerialComm. • DC Motor • Outputs • Feedback LEDs • User Knob • Power • Bootstrap • User Buttons
Battery Charging • Trickle-charge (normal mode) – Adapter plugged directly to HB, charge light ON • Takes 12-14 hours • Can leave indefinitely • Via Serial Interface (normal mode) – like trickle charge mode • Zap Charge – must set to ZAP mode • Charge in 3 hours • Charge light OFF • Be careful, remove after charging. • NOT YOUR FRIEND! EMERGENCY USE ONLY!
Interactive C • From Newton Labs: • Complete type safety. Interactive C verifies correct arguments for all function calls and types across separate ".c" files. • Array bounds checking. Array bounds are verified, preventing writing off the ends of arrays and corrupting memory. • Powerful, interpreted, very similar to C • Free IDE provided on website • Require Reg. Number • Serial communication through Adapter to HB via Telephone wire • Read manual for details • Load .c files through IDE to HB, restart HB and code will immediately start executing • Additional libraries may be needed for sensors: fencdrX.asm
Interactive C Free IDE available on Website License: Howie Choset, 24-user Key : 58471-53648-17580-18
Bootstrap to Get Started • Used to reset board in case of serious malfunction. 1 - While board is off, hold stop button down. 2 - Turn board power on 3 - Both LEDs should turn on, and the off. 4 - Only mode where board is on, but power light is off. • With IDE, loadpcode_hb.s19 • Pcode initializes the HB
See page 20 –24 void motor(int m, int p) Turns on motor m at power level p. Power levels range from 100 for full on forward to -100 for full on backward. void ao() Turns off all motors. ao is a short form for alloff. int analog(int p) Returns value of sensor port numbered p. Result is integer between 0 and 255. void stop press() Waits for STOP button to be pressed, then released. Then issues a short beep and returns. int knob() Returns the position of a knob as a value from 0 to 255. void sleep(float sec) Waits for an amount of time equal to or slightly greater than sec seconds. sec is a floating point number. void printf(char*) Print to LCD void beep() Produces a tone of 500 Hertz for a period of 0.3 seconds. Much Much more! Some Useful Library Functions
Care and Tips • BE CAREFUL!!!! • Trickle charge overnight. • Avoid Zap charge • Not all engines are equal. • Do not solder or glue anything directly to HB. • Build solid bases for HB in your robots. • There is limited memory, program wisely.
Final • Charge your batteries before Demo! • Everyone should have a base-level familiarity with the HB. • Look to website for reference material. Read some of this before you code. • Ask TAs for help before you get frustrated.