Download
1 / 66
660 likes | 678 Views
Learn about the various division schemes in computer arithmetic, including non-restoring and signed division. Understand the complexities of division compared to multiplication, the overflow possibilities, and the need for digit selection. Dive into the Pentium III latencies and instruction cycles for integer and floating-point division. Explore classification of dividers, array dividers, and convergence division, with detailed notations and basic equations. Master restoring and non-restoring division techniques through examples.

E N D
Lecture 10 Advanced Dividers
Required Reading Behrooz Parhami, Computer Arithmetic: Algorithms and Hardware Design Chapter 13, Basic Division Schemes 13.4, Non-Restoring and Signed Division Chapter 15 Variation in Dividers 15.6, Combined Multiply/Divide Units 15.3, Combinational and Array Dividers Chapter 16, Division by Convergence
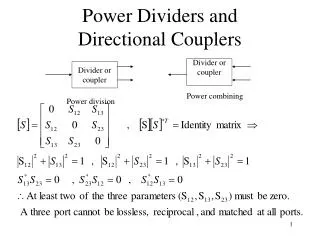
Division versus Multiplication Division is more complex than multiplication: Need for quotient digit selection or estimation Overflow possibility: the high-order k bits of z must be strictly less than d; this overflow check also detects the divide-by-zero condition. Pentium III latencies Instruction Latency Cycles/Issue Load / Store 3 1 Integer Multiply 4 1 Integer Divide 36 36 Double/Single FP Multiply 5 2 Double/Single FP Add 3 1 Double/Single FP Divide 38 38 The ratios haven’t changed much in later Pentiums, Atom, or AMD products* *Source: T. Granlund, “Instruction Latencies and Throughput for AMD and Intel x86 Processors,” Feb. 2012 Computer Arithmetic, Division
Classification of Dividers Array Dividers Dividers by Convergence Sequential Radix-2 High-radix • Restoring • Non-restoring • regular • SRT • using carry save adders • SRT using carry save adders
Notation z Dividend z2k-1z2k-2 . . . z2 z1 z0 d Divisor dk-1dk-2 . . . d1 d0 q Quotient qk-1qk-2 . . . q1 q0 s Remainder sk-1sk-2 . . . s1 s0 (s = z - dq)
Basic Equations of Division z = d q + s | s | < | d | sign(s) = sign(z) z > 0 0 s < | d | z < 0 - | d | < s 0
Sequential Integer Division Basic Equations s(0) = z s(j) = 2 s(j-1) - qk-j (2k d) for j=1..k s(k) = 2k s
Restoring Unsigned Integer Division s(0) = z for j = 1 to k if 2 s(j-1) - 2k d > 0 qk-j = 1 s(j) = 2 s(j-1) - 2k d else qk-j = 0 s(j) = 2 s(j-1)
Non-Restoring Unsigned Integer Division s(1) = 2 z - 2k d for j = 2 to k if s(j-1) 0 qk-(j-1) = 1 s(j) = 2 s(j-1) - 2k d else qk-(j-1) = 0 s(j) = 2 s(j-1) + 2k d end for if s(k) 0 q0 = 1 else q0 = 0 Correction step
Non-Restoring Unsigned Integer Division Correction step s = 2-k · s(k) z = q d + s z, q, d ≥ 0 s<0 z = (q-1) d + (s+d) z = q’ d + s’
Partial remainder variations for restoring andnonrestoring division
Non-Restoring Unsigned Integer Division Justification s(j-1) ≥ 0 2 s(j-1) - 2k d < 0 2 (2 s(j-1) )- 2k d ≥ 0 Restoring division Non-Restoring division s(j) = 2 s(j-1) s(j+1) = 2 s(j) - 2k d = = 4 s(j-1) - 2k d s(j) = 2 s(j-1) - 2k d s(j+1) = 2 s(j) + 2k d = = 2 (2 s(j-1) - 2k d)+ 2k d = = 4 s(j-1) - 2k d
Partial quotient 1111 1110 1101 q(2) 1100 Nonrestoring q(4) q 1011 1010 q(3) 1001 Restoring 1000 q(1) q(2) 0111 0110 0101 0100 0011 0010 0001 q(0) Iteration 0000 0 1 2 3 4 Convergence of the Partial Quotient to q Example (0 1 1 1 0 1 0 1)two / (1 0 1 0)two (117)ten/(10)ten = (11)ten = (1011)two In restoring division, the partial quotient converges to q from below In nonrestoring division, the partial quotient may overshoot q, but converges to it after some oscillations Computer Arithmetic, Division
Non-Restoring Signed Integer Division s(0) = z for j = 1 to k if sign(s(j-1)) == sign(d) qk-j = 1 s(j) = 2 s(j-1) - 2k d = 2 s(j-1) - qk-j (2k d) else qk-j = -1 s(j) = 2 s(j-1) + 2k d = 2 s(j-1) - qk-j (2k d) q = BSD_2’s_comp_conversion(q) Correction_step
Non-Restoring Signed Integer Division Correction step s = 2-k · s(k) z = q d + s sign(s) = sign(z) z = (q-1) d + (s+d) z = q’ d + s’ z = (q+1) d + (s-d) z = q” d + s”
======================== z 0 0 1 0 0 0 0 1 24d 1 1 0 0 1 –24d 0 0 1 1 1 ======================== s(0) 0 0 0 1 0 0 0 0 1 2s(0) 0 0 1 0 0 0 0 1 sign(s(0)) sign(d), +24d 1 1 0 0 1 so set q3 = -1 and add –––––––––––––––––––––––– s(1) 1 1 1 0 1 0 0 1 2s(1) 1 1 0 1 0 0 1 sign(s(1)) = sign(d), +(–24d)0 0 1 1 1 so set q2 = 1 and subtract –––––––––––––––––––––––– s(2) 0 0 0 0 1 0 1 2s(2) 0 0 0 1 0 1 sign(s(2)) sign(d), +24d 1 1 0 0 1 so set q1 = -1 and add –––––––––––––––––––––––– s(3) 1 1 0 1 1 1 2s(3) 1 0 1 1 1 sign(s(3)) = sign(d), +(–24d)0 0 1 1 1 so set q0 = 1 and subtract –––––––––––––––––––––––– s(4) 1 1 1 1 0 sign(s(4)) sign(z), +(–24d)0 0 1 1 1 so perform corrective subtraction –––––––––––––––––––––––– s(4) 0 0 1 0 1 s 0 1 0 1 q-1 1-1 1 ======================== Example of nonrestoring signed division p = 0 1 0 1 Shift, compl MSB 1 1 0 1 1 Add 1 to correct 1 1 0 0 Check: 33/(-7) = -4
BSD 2’s Complement Conversion q = (qk-1 qk-2 . . . q1 q0)BSD = = (pk-1 pk-2 . . . p1 p0 1)2’s complement where Example: qBSD 1 -1 1 1 qi pi p -1 0 1 0 1 1 1 1 q2’scomp 0 0 1 1 1 = 0 1 1 1 no overflow if pk-2 = pk-1 (qk-1 qk-2)
Nonrestoring Hardware Divider Computer Arithmetic, Division
Multiply/Divide Unit
Multiply-Divide Unit The control unit proceeds through necessary steps for multiplication or division (including using the appropriate shift direction) The slight speed penalty owing to a more complex control unit is insignificant Fig. 15.9 Sequential radix-2 multiply/divide unit.
Unsigned Fractional Division zfrac Dividend .z-1z-2 . . . z-(2k-1)z-2k dfrac Divisor .d-1d-2 . . . d-(k-1) d-k qfrac Quotient .q-1q-2 . . . q-(k-1) q-k sfrac Remainder .000…0s-(k+1) . . . s-(2k-1) s-2k k bits
Integer vs. Fractional Division For Integers: z = q d + s 2-2k z 2-2k = (q 2-k) (d 2-k) + s (2-2k) For Fractions: zfrac = qfrac dfrac + sfrac where zfrac = z 2-2k dfrac = d 2-k qfrac = q 2-k sfrac = s 2-2k
Unsigned Fractional Division Overflow Condition for no overflow: zfrac < dfrac
Sequential Fractional Division Basic Equations s(0) = zfrac s(j) = 2 s(j-1) - q-j dfrac for j=1..k 2k · sfrac = s(k) sfrac = 2-k · s(k)
Fig. 13.2 Examples of sequential division with integer and fractional operands.
Array Dividers
Sequential Fractional Division Basic Equations sfrac(0) = zfrac s(j) = 2 s(j-1) - q-j dfrac s(k)frac= 2k sfrac
Restoring Unsigned Fractional Division s(0) = z for j = 1 to k if 2 s(j-1) - d > 0 q-j = 1 s(j) = 2 s(j-1) - d else q-j = 0 s(j) = 2 s(j-1)
Restoring Array Divider Computer Arithmetic, Division
Non-Restoring Unsigned Fractional Division s(-1) = z-d for j = 0 to k-1 if s(j-1) > 0 q-j = 1 s(j) = 2 s(j-1) - d else q-j = 0 s(j) = 2 s(j-1) + d end forif s(k-1) > 0 q-k = 1 else q-k = 0
Nonrestoring Array Divider Similarity to array multiplier is deceiving Critical path Computer Arithmetic, Division
Division by Convergence Chapter Goals Show how by using multiplication as the basic operation in each division step, the number of iterations can be reduced Chapter Highlights Digit-recurrence as convergence method Convergence by Newton-Raphson iteration Computing the reciprocal of a number Hardware implementation and fine tuning Computer Arithmetic, Division
q 1 0.101101 Digit 0 16.1 General Convergence Methods Sequential digit-at-a-time (binary or high-radix) division can be viewed as a convergence scheme As each new digit of q = z / d is determined, the quotient value is refined, until it reaches the final correct value Convergence is from below in restoring division and oscillating in nonrestoring division Meanwhile, the remainder s = z – qd approaches 0; the scaled remainder is kept in a certain range, such as [–d, d) Computer Arithmetic, Division
q 1 0.101101 Digit 0 Elaboration on Scaled Remainder in Division The partial remainder s(j) in division recurrence isn’t the true remainder but a version scaled by 2j Division with left shifts s(j) = 2s(j–1) – qk–j(2kd) with s(0) = z and |–shift–| s(k) = 2ks |–––subtract–––| Quotient digit selection keeps the scaled remainder bounded (say, in the range –d to d) to ensure the convergence of the true remainder to 0 Computer Arithmetic, Division
Constant Desired function Recurrence Formulas for Convergence Methods u(i+1) = f(u(i), v(i)) v(i+1) = g(u(i), v(i)) u(i+1) = f(u(i), v(i), w(i)) v(i+1) = g(u(i), v(i), w(i)) w(i+1) = h(u(i), v(i), w(i)) Guide the iteration such that one of the values converges to a constant (usually 0 or 1) The other value then converges to the desired function The complexity of this method depends on two factors: a. Ease of evaluating f and g (and h) b. Rate of convergence (number of iterations needed) Computer Arithmetic, Division
Idea: Converges to q Force to 1 16.2 Division by Repeated Multiplications Motivation: Suppose add takes 1 clock and multiply 3 clocks 64-bit divide takes 64 clocks in radix 2, 32 in radix 4 Divide faster via multiplications faster if 10 or fewer needed Remainder often not needed, but can be obtained by another multiplication if desired: s = z – qd To turn the identity into a division algorithm, we face three questions: 1. How to select the multipliers x(i)? 2. How many iterations (pairs of multiplications)? 3. How to implement in hardware? Computer Arithmetic, Division
Idea: Converges to q Force to 1 u(i+1) = f(u(i), v(i)) v(i+1) = g(u(i), v(i)) Fits the general form Formulation as a Convergence Computation d(i+1)= d(i)x(i) Set d(0) = d; make d(m) converge to 1 z(i+1)= z(i)x(i) Set z(0) = z; obtain z/d = qz(m) Question 1: How to select the multipliers x(i)? x(i)= 2 – d(i) This choice transforms the recurrence equations into: d(i+1)= d(i)(2 -d(i)) Set d(0) = d; iterate until d(m) 1 z(i+1)= z(i)(2 -d(i)) Set z(0) = z; obtain z/d = qz(m) Computer Arithmetic, Division
Determining the Rate of Convergence d(i+1)= d(i)x(i) Set d(0) = d; make d(m) converge to 1 z(i+1)= z(i)x(i) Set z(0) = z; obtain z/d = qz(m) Question 2: How quickly does d(i)converge to 1? We can relate the error in step i + 1 to the error in step i: d(i+1)= d(i)(2 -d(i)) = 1 – (1 – d(i))2 1 – d(i+1)= (1 – d(i))2 For 1 – d(i) e, we get 1 – d(i+1) e2: Quadratic convergence In general, for k-bit operands, we need 2m – 1 multiplications and m 2’s complementations where m = log2 k Computer Arithmetic, Division
Quadratic Convergence Table 16.1 Quadratic convergence in computing z/d by repeated multiplications, where 1/2 d = 1 – y < 1 ––––––––––––––––––––––––––––––––––––––––––––––––––––––– i d(i) = d(i–1)x(i–1), with d(0) = dx(i) = 2 – d(i) ––––––––––––––––––––––––––––––––––––––––––––––––––––––– 0 1 – y = (.1xxx xxxx xxxx xxxx)two 1/2 1 + y 1 1 – y2 = (.11xx xxxx xxxx xxxx)two 3/4 1 + y2 2 1 – y4 = (.1111 xxxx xxxx xxxx)two 15/16 1 + y4 3 1 – y8 = (.1111 1111 xxxx xxxx)two 255/256 1 + y8 4 1 – y16 = (.1111 1111 1111 1111)two = 1 – ulp ––––––––––––––––––––––––––––––––––––––––––––––––––––––– Each iteration doubles the number of guaranteed leading 1s (convergence to 1 is from below) Beginning with a single 1 (d ½), after log2k iterations we get as close to 1 as is possible in a fractional representation Computer Arithmetic, Division
Graphical Depiction of Convergence to q Fig. 16.1 Graphical representation of convergence in division by repeated multiplications. Computer Arithmetic, Division
Fig. 16.6 Two multiplications fully overlapped in a 2-stage pipelined multiplier. 16.5 Hardware Implementation Repeated multiplications: Each pair of ops involves the same multiplier d(i+1)= d(i)(2 -d(i)) Set d(0) = d; iterate until d(m) 1 z(i+1)= z(i)(2 -d(i)) Set z(0) = z; obtain z/d = qz(m) Computer Arithmetic, Division