Download
1 / 26
280 likes | 455 Views
Rotational Mechanics. Rotary Motion. Rotation about internal axis (spinning) Rate of rotation can be constant or variable Use angular variables to describe rotation All parts of a rigid rotating object have same angular displacement, velocity and acceleration

E N D
Rotary Motion • Rotation about internal axis (spinning) • Rate of rotation can be constant or variable • Use angular variables to describe rotation • All parts of a rigid rotating object have same angular displacement, velocity and acceleration • Linear displacement and velocity depend on distance from rotation axis.
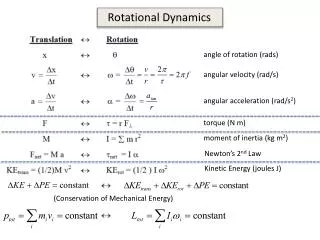
Radian Measure of Angles • Radian is ratio ofarcdistance subtended by angle to the radius: q = Ddarc/r • Radian is dimensionless (meters/meters) • One complete rotation equals 2p radians • One radian equals 57.3 degrees
Angular Displacement • Angular displacement (q), angle of rotation measured in radians • Linear displacement equals angular displacement times the radius • All parts of rotating object have same angular displacement
Angular Velocity • Change in angular displacement with respect to time w = Dq/Dt; fundamental units are rad/s, but usually measured in rev/s, or rev/min (rpm) • Vector with direction found using right hand rule: Curl fingers of right hand in direction of rotation. Extended thumb points in direction of vector
Angular Velocity • Linear velocity = angular velocity times radius, v = wr • All parts of rotating object have same angular velocity
Angular Acceleration • Change in angular velocity with respect to time: a = Dw / Dt; units are rad/s2 • Vector whose direction is found using right hand rule • If angular acceleration is constant, constant acceleration equations are used.
Linear vf = vi + aDt Dd = viDt + 1/2(aDt2) vf2 = vi2 + 2aDd Angular wf = wi + aDt D q = wiDt + 1/2(aDt2) wf2 = wi2 + 2aDq Constant Acceleration Equations
Center of Gravity • The point at which all object’s weight can be considered to be concentrated. • For symmetrical bodies with uniform density, c.o.g. will be at geometric center. • May be located outside the body of some objects. • Bodies or systems rotate about their center of gravity. • Similar to center of mass but not always the same
Parallel Forces • Forces acting in the same or opposite directions at different points on an object • Can produce rotation • Concurrent forces act at the same point (often the center of gravity) at the same time on an object
Weight Vectors • Drawn from center of gravity of object • Actually are the sum of an infinite number of parallel weight vectors from an infinite number of mass units • The effect is as if all the weight was concentrated at the center of gravity
Torque • The result of a force that produces rotation, a vector • The product of the force and its lever arm, • Lever arm (or moment arm) is a vector whose magnitude is the distance from the point of rotation to the point of application of the force • t = r x F • A product of two vectors that produces a third perpendicular vector
Torque • units are meters x newtons • signs: ccw torques are considered +, cw torques are - • direction of net torque is direction of resulting rotation
Rotational Inertia • Resistance of an object to any change in angular velocity • Depends on mass and its orientation with respect to axis of rotation. • Is rotational analogue to mass; symbol I, units kg m2 • Sometimes called moment of inertia
Rotational Inertia • For an object rotating about an external point, I = mr2 • For objects rotating about an internal axis, inertia must be calculated using calculus • Use rotational inertia equations for general type of regularly shaped solid bodies
Newton’s Second Law for Rotation • Substitute angular variables for linear • F = ma becomes t = Ia where t is the net torque and I is the rotational inertia of the body.
Work in Rotary Motion • Work done by torque • W = tDq = FrDq • q is angular displacement in radians • Assumes force is perpendicular to radius
Power in Rotary Motion • Power is rate of doing work • P = tDq/Dt • Dq/Dt = w, so P = tw
Kinetic Energy in Rotary Motion • Energy possessed by rotating object • KErot = 1/2(Iw2) • Rolling objects have both linear and rotational kinetic energy
Kinetic Energy in Rotary Motion • When object rolls downhill, potential energy is converted to both types of kinetic energy; amount of each depends on rotational inertia of object.
Angular Momentum • The tendency of a rotating object to continue rotating • A combination of the rotational inertia and angular velocity • For a rotating object, L = Iw • A vector
Angular Momentum • Objects in circular motion also have angular momentum: L = mvr • Angular momentum can be applied to any moving object with respect to an external point • Radial distance is perpendicular distance form path of object to the point
Conservation of Angular Momentum • External net torque is required to change angular momentum • If no net external torque is present, angular momentum of a system will remain constant • Total angular momentum before the interaction equals total angular momentum after the interaction as long as no net external torque acts on the system
Conservation of Angular Momentum • Always true, from atomic to galactic interactions • If rotational inertia changes, angular velocity must change to conserve angular momentum
Precession • A secondary rotation of the axis of rotation • Due to torque produced by weight of rotating object • Causes angular acceleration that changes direction of angular velocity of rotating object • Earth precesses on its axis with a secondary rotation period of 26,000 years