Download
1 / 18
180 likes | 300 Views
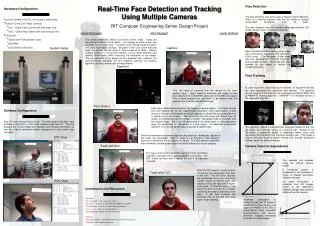
Tracking Humans using Multiple pairs of PTZF Cameras and Wide-Angle Cameras. Author: Abhilash Jindal , Y7009 Brajesh Kushwaha , Y7119 Supervisor: Dr. K. S. Venkatesh Dr. Krithika Venkataramani. Aim. Identifying and tracking a VIP using 3 pairs of PTZF and wide-angle cameras.

E N D
Tracking Humans using Multiplepairs of PTZF Cameras andWide-Angle Cameras Author: AbhilashJindal, Y7009 BrajeshKushwaha, Y7119 Supervisor: Dr. K. S. Venkatesh Dr. KrithikaVenkataramani
Aim Identifying and tracking a VIP using 3 pairs of PTZF and wide-angle cameras. The final system's performance can be can be described as:- • Detecting all the humans in the field of view of the wide-angle cameras. • Targeting people one by one by the wide-angle cameras. • Passing the track to the PTZF camera from the corresponding wide-angle camera. • Simultaneous zooming of all the PTZF cameras onto each person's face. • Cross-checking the combined outputs of the PTZF cameras against a human face-database to recognize our VIP. • Tracking the identified VIP by the PTZF cameras simultaneously.
Overview of the work The work has been divided into 5 parts: • Control of the PTZF cameras. • Human-Tracking using single camera. • Transformation of the pixels in wide-angle camera to PTZF camera. • Fusion of data from 3 wide-angle camera for improved tracking. • Recognizing individual from the output of 3 PTZF cameras. The last part is being done as a part of a different B.Tech Project under the supervision of Dr. KrithikaVenkataramani.
Background subtraction and Contour evaluation Original Frame Fore-ground Tracked Object with contour drawn
Camshift Tracking • It is based on the photometric cues of the image frame. Taking color sample Histogram of the selected part
Improved Tracking Original Frame Masked Frame Fore-ground
Apply Camshift on each part Confidence Evaluation Divided image frame Tracked aligned parts
Confidence Evaluation Histogram (Frame1) Real no. [0,1] Cross- Correlation Histogram (Current-Frame )
Aligning Trackers • If confidence(tracker Legs) < threshold, flag(Legs)=0; • If(flag(Legs)==0), if(flag(torso)!=0) align(Legs, torso); else align(Legs, Head); Similarly for the other two trackers.
Kalman Filtering where, zk: Measurementxk: stateuk: control input wk: process noisevk: measurement noise F: transfer matrix
where, R: measurement error matrix / covariance of vkQ: covariance of wkP: error covariance • The measurement error(R) has been made inversely proportional to the confidence. An increased error ensures less importance is given to the current measurement whose confidence is low. • The weights in the Transfer matrix (F) have been set heuristically.
xk = State of the model (after kth update) zk = kth measurement of parameters
Work to be done • Designing a controller for the PTZF camera for a better time-response during tracking. • Transforming wide-angle camera co-ordinates to the corresponding PTZF camera. • Extending the single camera tracking to multi-camera tracking.
References • A. Ariel, G. Mikhail, et al. Robust Real-Time background subtraction based on Local Neighborhood patterns. EURASIP Journal on Advances in Signal Processing, 2010, 2010. • M.D. Dixit, Combining edge and color features to track partially occluded humans, M.Tech thesis, Department of Electrical Engineering,May 2009