Download
1 / 1
10 likes | 117 Views
Dynamic Medial Axis Based Motion Planning in Sensor Networks Lan Lin and Hyunyoung Lee Department of Computer Science University of Denver llin,hlee@cs.du.edu. Introduction. Path Planning. Dynamic Medial Axis.

E N D
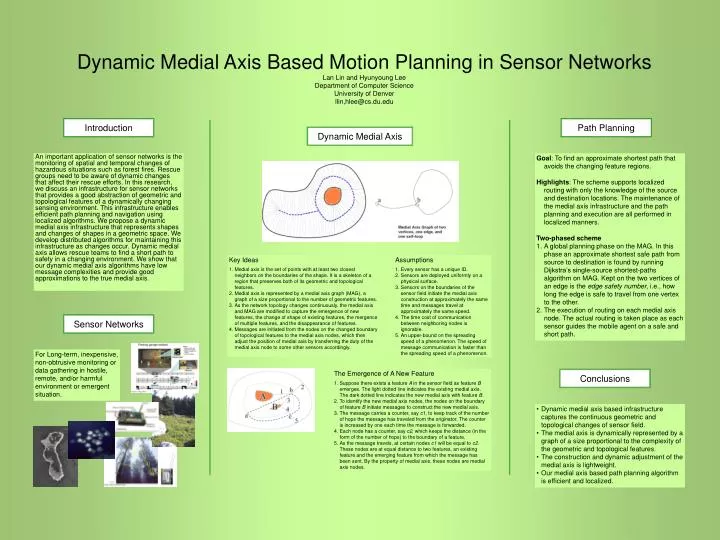
Dynamic Medial Axis Based Motion Planning in Sensor Networks Lan Lin and Hyunyoung Lee Department of Computer Science University of Denver llin,hlee@cs.du.edu Introduction Path Planning Dynamic Medial Axis An important application of sensor networks is the monitoring of spatial and temporal changes of hazardous situations such as forest fires. Rescue groups need to be aware of dynamic changes that affect their rescue efforts. In this research, we discuss an infrastructure for sensor networks that provides a good abstraction of geometric and topological features of a dynamically changing sensing environment. This infrastructure enables efficient path planning and navigation using localized algorithms. We propose a dynamic medial axis infrastructure that represents shapes and changes of shapes in a geometric space. We develop distributed algorithms for maintaining this infrastructure as changes occur. Dynamic medial axis allows rescue teams to find a short path to safety in a changing environment. We show that our dynamic medial axis algorithms have low message complexities and provide good approximations to the true medial axis. • Goal: To find an approximate shortest path that avoids the changing feature regions. • Highlights: The scheme supports localized routing with only the knowledge of the source and destination locations. The maintenance of the medial axis infrastructure and the path planning and execution are all performed in localized manners. • Two-phased scheme • A global planning phase on the MAG. In this phase an approximate shortest safe path from source to destination is found by running Dijkstra’s single-source shortest-paths algorithm on MAG. Kept on the two vertices of an edge is the edge safety number, i.e., how long the edge is safe to travel from one vertex to the other. • The execution of routing on each medial axis node. The actual routing is taken place as each sensor guides the mobile agent on a safe and short path. • Key Ideas • Medial axis is the set of points with at least two closest neighbors on the boundaries of the shape. It is a skeleton of a region that preserves both of its geometric and topological features. • Medial axis is represented by a medial axis graph (MAG), a graph of a size proportional to the number of geometric features. • As the network topology changes continuously, the medial axis and MAG are modified to capture the emergence of new features, the change of shape of existing features, the mergence of multiple features, and the disappearance of features. • Messages are initiated from the nodes on the changed boundary of topological features to the medial axis nodes, which then adjust the position of medial axis by transferring the duty of the medial axis node to some other sensors accordingly. • Assumptions • Every sensor has a unique ID. • Sensors are deployed uniformly on a physical surface. • Sensors on the boundaries of the sensor field initiate the medial axis construction at approximately the same time and messages travel at approximately the same speed. • The time cost of communication between neighboring nodes is ignorable. • An upper-bound on the spreading speed of a phenomenon. The speed of message communication is faster than the spreading speed of a phenomenon. Sensor Networks For Long-term, inexpensive, non-obtrusive monitoring or data gathering in hostile, remote, and/or harmful environment or emergent situation. • The Emergence of A New Feature • Suppose there exists a feature A in the sensor field as feature B emerges. The light dotted line indicates the existing medial axis. The dark dotted line indicates the new medial axis with feature B. • To identify the new medial axis nodes, the nodes on the boundary of feature B initiate messages to construct the new medial axis. • The message carries a counter, say c1, to keep track of the number of hops the message has traveled from the originator. The counter is increased by one each time the message is forwarded. • Each node has a counter, say c2, which keeps the distance (in the form of the number of hops) to the boundary of a feature. • As the message travels, at certain nodes c1 will be equal to c2. These nodes are at equal distance to two features, an existing feature and the emerging feature from which the message has been sent. By the property of medial axis, these nodes are medial axis nodes. Conclusions • Dynamic medial axis based infrastructure captures the continuous geometric and topological changes of sensor field. • The medial axis is dynamically represented by a graph of a size proportional to the complexity of the geometric and topological features. • The construction and dynamic adjustment of the medial axis is lightweight. • Our medial axis based path planning algorithm is efficient and localized.