Download
1 / 3
50 likes | 378 Views
KUKA.RoboTeam. Kooperierende Roboter. Beschreibung Das KUKA Roboter Applikationspaket RoboTeam erlaubt die einfache Synchronisation der Bahn-Bewegungen von bis zu 15 Robotern. Es besteht aus folgenden Einzelpaketen: KUKA.CR.ProgramCooperation KUKA.CR.MotionCooperation

E N D
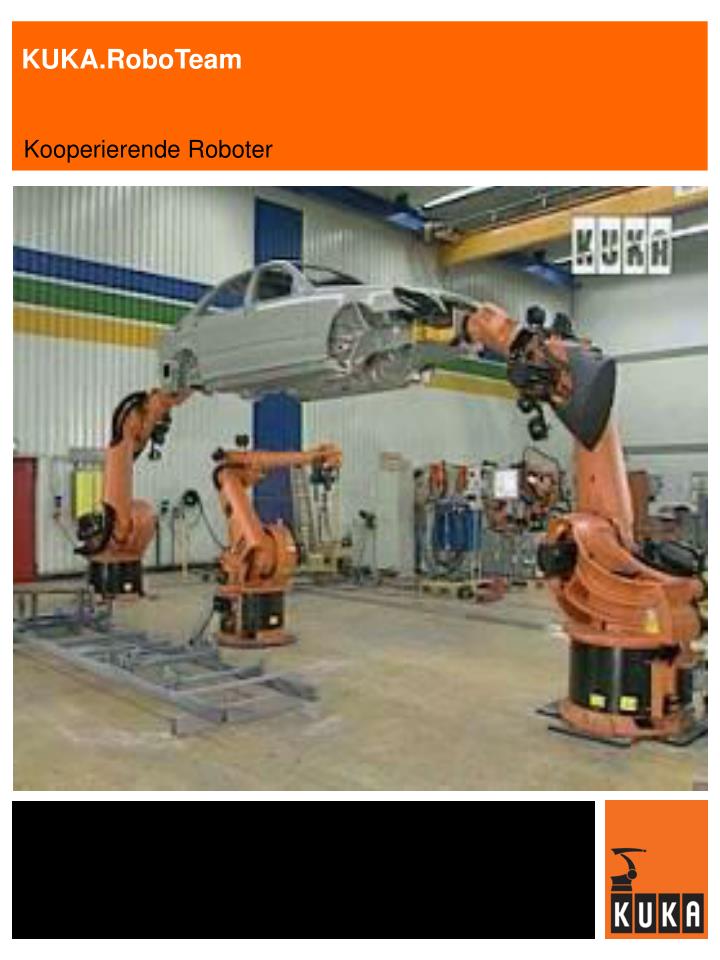
KUKA.RoboTeam Kooperierende Roboter
BeschreibungDas KUKA Roboter Applikationspaket RoboTeam erlaubt die einfache Synchronisation der Bahn-Bewegungen von bis zu 15 Robotern. Es besteht aus folgenden Einzelpaketen: • KUKA.CR.ProgramCooperation • KUKA.CR.MotionCooperation • KUKA.CR.ArcTech Digital (vgl. ausführliches SW-Datenblatt) • Einsatzgebiete • Flexible Produktionsanlagen mit Prozessen während der Bauteilbewegung • Flexible Positionierung von Bauteilen und Transport großer Lasten durch mehrere Roboter • Systemvoraussetzungen • KR C2 ed05 • RoboTeam HW-Erweiterungen • Systemsoftware V5.3 oder V5.4 • Ethernet-Vernetzung • Shared Pendant • Features • RoboTeam • Kommunikation zwischen allen Steuerungen über ein hochverfügbares Fast-Ethernet • Dediziertes Sicherheits-Netzwerk für das sichere Betreiben der Robotergruppe • Ein gemeinsames Bediengerät zur Programmierung und Verfahren der Robotergruppe • KUKA.CR.ProgramCooperation • Verlagerung klassischer SPS-Aufgaben in die Robotergruppe • Verwaltung von Arbeitsbereichen innerhalb der Robotergruppe • Analyse und Visualisierung der aktuellen Bereichsbelegungen • Programmablaufsynchronisation verteilter Roboterprogramme • KUKA.CR.MotionCooperation • Spannerloses Positionieren und Fügen von Werkstücken zur weiteren Prozessverarbeitung • Flexible Vervielfachung der Traglast von Standard-Robotern durch Lastteilung • Prozess- und reichweitenoptimierte Positionierung von Bauteilen in Vorzugslage
Vorteile: • KUKA.CR.ProgramCooperation • Verlagerung klassischer SPS-Aufgaben in die Robotergruppe • Verwaltung von Arbeitsbereichen innerhalb der Robotergruppe • Analyse und Visualisierung der aktuelle Bereichsbelegungen • Programmablaufsynchronisation verteilter Roboterprogramme • KUKA.CR.MotionCooperation • Spannerloses Positionieren und Fügen von Werkstücken zur weiteren Prozessverarbeitung • Flexible Vervielfachung der Traglast von Standard-Robotern durch Lastteilung • Prozessoptimierte Positionierung von Bauteilen in Vorzugslage • Reichweiten- und auslastungsoptimierte Positionierung von Bauteilen • Reduzierung von reinen Transportzeiten durch die Bearbeitung von Bauteilen während des Transportes in Fließ-Fertigung CellMap Simulation: Die Synchronisationssignale aller betei- ligten RoboTeam-Steuerungen können simuliert sowie Steuerungsaktionen syn- chronisiert werden. Das Erstellen und Ändern von Programmen sowie Testläufe sind ohne die beteiligten Steuerungen möglich. Inline-Formulare für alle Funktionen: Die Programmierung von RoboTeam-Gruppen erfolgt auf komfortable und übersichtliche Weise durch Inline- Formulare, die alle Befehlsparameter erhalten und Fehleingaben ausschließen. KUKA Roboter GmbH Hery-Park 3000 86368 GersthofenTel.: +49 821 4533-0Fax: +49 821 4533-1616info@kuka-roboter.de
