Download
1 / 67
• 670 likes • 854 Views
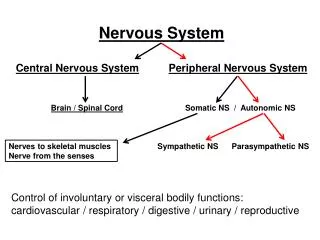
System Level Neuroengineering Modeling of the Nervous System Cancun Dec 2008 I. Steve Massaquoi The Problem Overview of sensorimotor control system Attention to cerebellar system architecture RIPID control model as example of medium high level model Preliminary implications of model

E N D
System Level Neuroengineering Modeling • of the Nervous System • Cancun Dec 2008 • I. Steve Massaquoi • The Problem • Overview of sensorimotor control system • Attention to cerebellar system architecture • RIPID control model as example of medium high level model • Preliminary implications of model • II. Kazutaka Takahashi • Cerebrocerebellar system architecture in greater detail • RICSS Quantitative model of internal signal generation • Model adequacy and modeling issues • Relation of dynamic models to point process signal analysis
System Level Neuroengineering Modeling of Nervous System I. Massaquoi CDC Cancun 2008 I. The Problem to develop increasingly comprehensive, integrated, multi-resolution engineering models of nervous system structure and function Motivations Scientific: i. understanding the principles of human behavior and intelligence in quantitative, mechanistic terms ii. understanding the principles of neurological and psychiatric disease in quantitative, mechanistic terms Engineering: i. design of devices to mimic and potentially supersede human behavior artificially ii. development of devices that better interact with the nervous system to study, restore or extend human function
System Level Neuroengineering Modeling of Nervous System I. System Level Neuroengineering Modeling of Nervous System I. Massaquoi CDC Cancun 2008 • I The Problem (cont’d) • Key Challenges (constraints) for Neuroengineering models: • Models must respect known or highly suspected neuroantomical connections • Models must respect known time delays and phase lags • (these are non-trivial) • C. Models must utilize functions that are known to be achievable by collections of neurons. • (e.g. Quantitative multiplication ?) • Models must be consistent with both normal human function, and pathological dysfunction. • Models of human function should be able to be related to those of animals in a manner consistent with natural evolution (i.e. continuously) • Models must ultimately account for the firing behavior of system neurons • (i.e. must be multi-resolution)
System Level Neuroengineering Modeling of Nervous System I. System Level Neuroengineering Modeling of Nervous System I. Massaquoi CDC Cancun 2008 • I The Problem (cont’d) • Style of approach: Ideal features of Neuroengineering models: • A. Models should seek to explain the nervous system in terms of established engineering principles and abstractions • (e.g. filters, estimators, feedback/feedforward controllers, registers, switches • not simply to formulate a computational model) • B. Models should point to potentially fruitful areas of engineering research where current engineering methods are lacking. • Models are more profitably driven by science, and guided by engineering principles. . . Rather than vice versa • (editorial remark!)
System Level Neuroengineering Modeling of Nervous System I. System Level Neuroengineering Modeling of Nervous System I. Massaquoi CDC Cancun 2008 I The Problem (cont’d) Neuroengineering strategy Modeling and analysis Behavior & Intelligence: Bottom up Primitive complex mimicking evolution editorial comment #2 Intelligence will emerge
System Level Neuroengineering Modeling of Nervous System I. Massaquoi CDC Cancun 2008 I The Problem (cont’d) Neuroengineering strategy Modeling and analysis Behavior & Intelligence: Bottom up Primitive complex mimicking evolution editorial comment #2 Intelligence will emerge Modeling and analysis of Physiology: Simultaneous multi-resolution neuron circuits architecture Massaquoi
System Level Neuroengineering Modeling of Nervous System I. Massaquoi CDC Cancun 2008 I The Problem (cont’d) Neuroengineering strategy Modeling and analysis Behavior & Intelligence: Bottom up Primitive complex mimicking evolution editorial comment #2 Intelligence will emerge Modeling and analysis of Physiology: Simultaneous multi-resolution neuron circuits architecture Takahashi
System Level Neuroengineering Modeling of Nervous System I. Massaquoi CDC Cancun 2008 I The Problem (cont’d) Neuroengineering strategy Modeling and analysis Behavior & Intelligence: Bottom up Primitive complex mimicking evolution editorial comment #2 Intelligence will emerge Modeling and analysis of Physiology: Simultaneous multi-resolution neuron circuits architecture Emphasis for rest of session
System Level Neuroengineering Modeling of Nervous System I. Massaquoi CDC Cancun 2008 I The Problem (cont’d) Neuroengineering strategy Modeling and analysis Behavior & Intelligence: Bottom up Primitive complex mimicking evolution editorial comment #2 Intelligence will emerge Modeling and analysis of Physiology: Simultaneous multi-resolution neuron circuits architecture Investigate both health and disease
System Level Neuroengineering Modeling of Nervous System I. Massaquoi CDC Cancun 2008 • The problem • Overview of the sensorimotor control system -- Multi-loop architecture, feedback and delays -- Internal dynamic models? • RIPID Model -- Physiology -- Stability analysis -- Cerebellar linear gainscheduling? • Application to bipedal balance and locomotion
System Level Neuroengineering Modeling of Nervous System I. Massaquoi CDC Cancun 2008 • Human motor control principal information flow (adapted from V. Brooks, 1986) “highest level” PLANS (strategy) “middle level” PROGRAMS (tactics) “lower level” ACTION (force, velocity) Caudate & GP Putamen & GP “Motor Servo” Brainstem or Spinal Cord Segment Frontal & Parietal Assoc Ctx Mtr Ctx Im Ant Cbl L Ant Cbl Muscle & tendon, Joints, skin Neural signals executive sensory M. Cbl Flocc Cbl Body Force/ Motion Vestib Visual
System Level Neuroengineering Modeling of Nervous System I. Massaquoi CDC Cancun 2008 • Motor Servo Concept? “highest level” PLANS (strategy) “middle level” PROGRAMS (tactics) “lower level” ACTION (force, velocity) Caudate & GP Putamen & GP “Proprioceptive Motor Servo ?” Actuator ? Brainstem or Spinal Cord Segment Frontal & Parietal Assoc Ctx Mtr Ctx Im Ant Cbl L Ant Cbl Muscle & tendon, Joints, skin M. Cbl Flocc Cbl Body Force/ Motion Vestib Visual
System Level Neuroengineering Modeling of Nervous System I. Massaquoi CDC Cancun 2008 • Programmed Triggered Response Loops? “highest level” PLANS (strategy) “lower level” ACTION (force, velocity) “middle level” PROGRAMS (tactics) Caudate & GP Putamen & GP (programmed) Stimulus- Response Loops? Brainstem or Spinal Cord Segment Frontal & Parietal Assoc Ctx Mtr Ctx Im Ant Cbl L Ant Cbl Muscle & tendon, Joints, skin M. Cbl Flocc Cbl Body Force/ Motion Vestib Visual
System Level Neuroengineering Modeling of Nervous System I. Massaquoi CDC Cancun 2008 • Possible refinement of upper portion “highest level” PLANS, ALGORITHMS (free assoc, strategy) “high level” PROGRAMS (discrete control) (tactics: trajectories cues) “intermediate level” CONTROL (continuous control) (stability, tracking, stiffness, scaling, movement time) Caudate & GP Putamen & GP, SN “Proprioceptive Motor Servo ?” Frontal & Parietal Assoc Ctx Primary & Peri- Sensorimotor Ctxs Mtr Ctx L Ant Cbl Im Ant Cbl L Post Crerebellum Cognitive Programming? M. Cbl Flocc Cbl (programmed) Stimulus- Response Loops?
System Level Neuroengineering Modeling of Nervous System I. Massaquoi CDC Cancun 2008 • Important sensorimotor control issues: 1) (often) low plant stiffness 2) significant time delays/phase lags ~35-40 ms round trip to elbow + low pass filtering of neural signal at muscle if not compensated, cause significant instability Brainstem or Spinal Cord Segment ~8 ms Frontal & Parietal Assoc Ctx Primary and Peri- Sensorimotor Ctxs Mtr Ctx DT Im Ant Cbl L Ant Cbl r2/(s+r)2 Muscle & tendon, Joints, skin DT Body Force/ Motion ~10 ms
System Level Neuroengineering Modeling of Nervous System I. Massaquoi CDC Cancun 2008 •As a result, considerable thinking views cerebellum as an adaptive compensator that incorporates internal models of inverse and/or forward dynamics. Eg: Feedback error learning of inverse dynamics? + qref + P G DT – + DT Kawato & Gomi, 1992 Smith Predictor? qref + G P DT – – + DT2 DT Miall et al, 1993
System Level Neuroengineering Modeling of Nervous System I. Massaquoi CDC Cancun 2008 • The problem • Overview of the sensorimotor control system -- Multi-loop architecture, feedback and delays -- Internal dynamic models? • RIPID Model -- Structure and performance -- Stability analysis -- Cerebellar gainscheduling? • Application to bipedal balance and locomotion
Simpler control approaches may also fit better with what is known about cerebellar architecture
Specifically, control must be implemented by simple lattice-like modular architecture of cerebellum (phylogenetically strongly conserved) medio-lateral Cortex of folium Deep white matter PF PC Branch of Major Input Channels: Parallel Fibers (PF) ~1011, 1012 3-6 mm in humans (very long) & thin, very slowly conducting 0.5 m/sec Primary Processing Elements: Purkinje Cells (PC), 1.5x107
Operation? Activated “beam” of parallel fibers (known) …. PFs Inhibition by sidepath – y(t) u(t) + MF DCN control signal input (?) (Mossy Fiber to PF and DCN) direct excitation
Dt b2 CbCtx - + y(t) u(t) b1 Dn • In light of its connectivity, we can consider that the lateral cerebellum may compute proportional and derivative signals b2represents adaptable weight y(t)=b1u(t)-b2u(t-Dt) y(t) =(b1-b2)u(t) + b2(u(t) -u(t-Dt)) Y(s)( gbs+ gk)U(s) srepresents Laplace complex frequency variable PD
…. and that the intermediate cerebellum may compute integral signals b 4 b 2 C bCtx - b - 3 y (t ) I p I p M F b + 1 u (t ) + + z (t) L RN RN mc I
Dt b2 b 4 b 2 CbCtx C bCtx - b - - 3 + y (t ) y(t) u(t) I p I p M F b1 b + 1 Dn u (t ) + + z (t) L RN RN mc • …. Together, cerebellar regions may implement “PID” (control) circuitry I PD
• … so a simple linear control system structure may be considered. spinomusculoskeletal plant with low-pass muscle activation dynamics s gb qref q gk + + + P(s) ia/s Tspr mc – + – – + 1/s f2 i2 i1 Tspr
• … so a simple linear control system structure may be considered. neural “long-loop” signal transmission delays s gb qref q gk + + + P(s) ia/s Tspr mc – + – – + 1/s f2 i2 i1 Tspr
• … so a simple linear control system structure may be considered. peri- and primary sensorimotor cortex including integrator and direct paths s gb qref q gk + + + P(s) ia/s Tspr mc – + – – + 1/s f2 i2 i1 Tspr
• … so a simple linear control system structure may be considered. Linear cerebellar processing s gb qref q gk + + + P(s) ia/s Tspr mc – + – – + 1/s f2 i2 i1 Tspr
• … so a simple linear control system structure may be considered. Proposal: Stabilized feedback PID control model of cerebellum “PID” Proportional Derivative Integral s gb qref q gk + + + P(s) ia/s Tspr mc – + – – + 1/s f2 i2 i1 Tspr
• … so a simple linear control system structure may be considered. Proposal: Stabilized feedback PID control model of cerebellum key added feature: integrator in feedback path to add phase-lead that stabilizes against transmission delays s gb qref q gk + + + P(s) ia/s Tspr mc – + – – + 1/s f2 i2 i1 Tspr
• … so a simple linear control system structure may be considered. Key Feature: Recurrent integrator that adds phase lead to PID = “RIPID” model s gb qref q gk + + + P(s) ia/s Tspr mc – + – – + 1/s f2 i2 i1 Tspr
• … so a simple linear control system structure may be considered. Key Feature:Recurrent integrator that adds phase lead to PID re-represented showing zero at origin sgb qref gk + + + ia/s P(s,DT) DT + – – + 1/s f3 f2 i1 DT
1.2 1 0.8 0.6 0.4 0.2 0 -0.2 -0.4 0 0.5 1 1.5 2 2.5 3 • Postural regulation: Impulse response of linear elbow joint model to 1 Nt force for different values of segmental reflex gain Figure R1. Impulsive disturbance response of elbow as function of f1 segmental reflex gain f1 = 0 segmental reflex gain f1 = 0.4 segmental reflex gain f1 = 1.5 radians seconds
Postural regulation:Impulse response of plant to 1 Nt force with contribution of RIPID-stabilized long-loop responses with and without muscular coactivation. Figure R2a. Impulsive disturbance response of elbow with long-loop control 1 (+)segmental reflex, (-)long-loop (+)long-loop, (-)segmental reflex (+)long-loop, (+)segmental reflex 0.5 radians 0 -0.5 0 0.5 1 1.5 2 2.5 3 seconds Figure R2b. Impulsive disturbance response of elbow with cocontraction, long-loop and segmental reflex control 1 (+)cocontraction, (+)segmental reflex, (-)long-loop (+)cocontraction, (+)long-loop, (-)segmental reflex (+)cocontraction, (+)long-loop, (+)segmental reflex 0.5 radians 0 -0.5 0 0.5 1 1.5 2 2.5 3 seconds
Postural regulation:Viscous and Elastic force responses to small amplitude sinusoidal position disturbance (* Rack, 1981) Figure 4a. Force response to sinusoidal position disturbance input 250 Data* Simulation 200 150 joint (angular) viscosity Nm-s/rad 100 50 0 -60 -40 -20 0 20 40 60 80 100 120 joint (angular) stiffness Nm/rad
• Effect of cerebellar lesions: lateral gk, and/or intermediate recurrent integrator i2 gbd/dt qref gk X + + + ia/s P(s,DT) DT + – – – + X ∫ f3 f2 i2 i1 DT
Postural regulation (pathological): Effect of reducing cerebellum-related gainsgkand/ori2, without and with muscular co-activation Figure R5a. Elbow disturbance response with decreased cerebellar gains i2 and gk, no cocontraction 1 i2 normal, gk normal (Figure 2a) i2 normal, gk reduced i2 reduced, gk reduced radians 0.5 0 -0.5 0 0.5 1 1.5 2 2.5 3 seconds Figure R5b. Elbow disturbance with decreased cerebellar gains i2 and gk and cocontraction 1 i2 normal, gk normal, (-)cocontraction i2 normal, gk reduced, (+)cocontraction i2 reduced, gk reduced, (+)cocontraction radians 0.5 0 -0.5 0 0.5 1 1.5 2 2.5 3 seconds
System Level Neuroengineering Modeling of Nervous System I. Massaquoi CDC Cancun 2008 • The problem • Overview of the sensorimotor control system -- Multi-loop architecture, feedback and delays -- Internal dynamic models? • RIPID Model -- Structure & performance -- Stability analysis -- Cerebellar gainscheduling? • Application to bipedal balance and locomotion
• Without RIPID controller, cortical integrator and bypass path Start with a simple nominal linear model of spinomuscular apparatus with long loop gainK,and delays. spinomusculoskeletal plant including peripheral nerve delays udesc q 0 + P(s,DT) K Tcns(s) + – (1+0.1s) Tcns(s) Tpr(s) CNS
• With RIPID Controller, cortical integrator and bypass path Consider behavior for various values of gain K q qref + K ia/s P(s,DT) Tcns(s) – f3 (1+0.1s) 1+sf2/iaf3 Tcns(s) Tpr(s) CNS
Natural frequencies (x) of RIPID model for K=0, and zeros (o) in complex plane: musculoskeletal dynamics Poles related to E-A coupling Recurrent Integrator x x x x x x thalamocortical integrator
Natural frequencies (x) of RIPID model for K=0, and zeros (o) in complex plane: primary spindle afferent controller cortical integrator bypass path recurrent integrator
Natural frequencies (x) of RIPID model for K > 0, and zeros (o) in complex plane:
System Level Neuroengineering Modeling of Nervous System I. Massaquoi CDC Cancun 2008 • The problem • Overview of the sensorimotor control system -- Multi-loop architecture, feedback and delays -- Internal dynamic models? • RIPID Model -- Structure & performance -- Stability analysis -- Cerebellar gainscheduling? • Application to bipedal balance and locomotion
Operation? Activated “beam” of parallel fibers (known) …. Two classes (?, speculation) PFs s(t) MF context-specific selector input (?) (Mossy Fiber to PF) Inhibition by sidepath – y(t) u(t) + MF DCN control signal input (?) (Mossy Fiber to PF and DCN) direct excitation
Operation? Activated “beam” of parallel fibers focused by lateral inhibition (reasonably established). laterally inhibited Purkinje Cells PFs s(t) MF context-specific selector fiber (Mossy Fiber to PF) – y(t) u(t) + MF input signal (Mossy Fiber to PF)
Operation? Activated “beam” of parallel fibers and lateral inhibition. Together, Possible selection mechanism? (net behavior not definitively established) PFs s(t) MF common teaching input Climbing fibers (CF) context-specific selector fiber (Mossy Fiber to PF) – y(t) u(t) + MF input signal (Mossy Fiber to PF)
Adaptation of selected synaptic weight? (PF - PC synapse known to be adaptive (decreases) under coincident PF - CF activity, Ito, 1984) s(t) teaching signal responding to behavioral error (CF) context-specific selector fiber (MF-PF) – y(t) u(t) + input signal (MF-PF)
• A slightly enhanced version suited for gainscheduling studies: “intent” e qref scheduling variables “motor command” e q + + + P(s) mc ia/s Tspr – + – + s gb(i) S(e) + + cerebral cortex gk(i) S(e) + 1/s + I1(i) S(e) i2 – – i3 cerebellum f2 Tspr
• A slightly enhanced version suited for gainscheduling studies: “intent” e qref scheduling variables “motor command” e q + + + P(s) mc ia/s Tspr – + – + s gb(i) S(e) + + cerebral cortex gk(i) S(e) + 1/s + I1(i) S(e) i2 – – state i3 Tspr cerebellum f2 Tspr