Download
1 / 20
200 likes | 368 Views
logaritmus posteriorní pravděpodobnosti:. Taylorův rozvoj v p 0 :. Aproximace posteriorní pdf v okolí maxima:. Gaussián:. Aproximace neurčitosti odhadu p :. Bayesův teorém pro spojitou náhodnou proměnnou. Neurčitost odhadu p. p – pravděpodobnost, že při jednom hodu padne orel:.

E N D
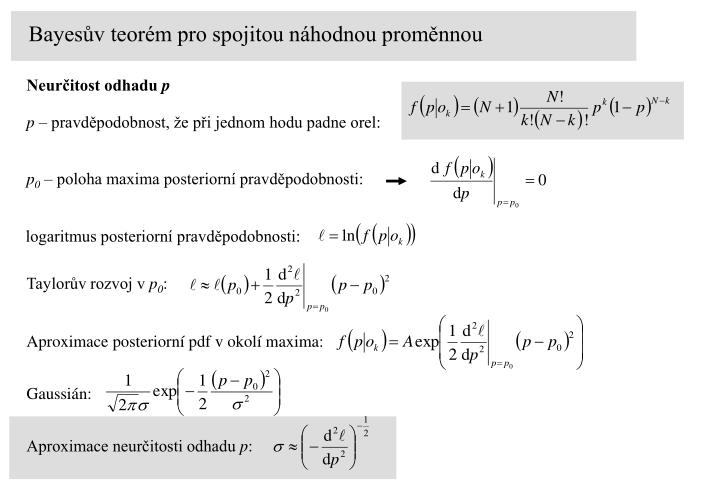
logaritmus posteriorní pravděpodobnosti: Taylorův rozvoj v p0: Aproximace posteriorní pdf v okolí maxima: Gaussián: Aproximace neurčitosti odhadu p: Bayesův teorém pro spojitou náhodnou proměnnou Neurčitost odhadu p p – pravděpodobnost, že při jednom hodu padne orel: p0 – poloha maxima posteriorní pravděpodobnosti:
p0 – poloha maxima posteriorní pravděpodobnosti: Aproximace neurčitosti odhadu p: Bayesův teorém pro spojitou náhodnou proměnnou Neurčitost odhadu p p – pravděpodobnost, že při jednom hodu padne orel:
Aproximace neurčitosti odhadu p: Bayesův teorém pro spojitou náhodnou proměnnou
a l x0 xi (věrohodnost) maximální věrohodnost Problém majáku • předpokládáme, že l známe • chceme najít odhad x0
N = 1 N = 2 N = 3 N = 8 Problém majáku
podmínka pro odhad polohy: podmínka pro odhad neurčitosti: Problém majáku odhad neurčitosti polohy majáku
N = 8 0.6 0.4 f(x0|DN) 0.2 0.0 -10 -8 -6 -4 -2 0 2 4 6 8 10 x 0 Problém majáku x0 = 4.0 ± 0.6
odhad neurčitosti: 95% interval spolehlivosti (x1,x2): Interval spolehlivosti asymetrická posteriorní pdf
odhad neurčitosti: 95% interval spolehlivosti (x1,x2): Interval spolehlivosti asymetrická posteriorní pdf
N = 1000 x0 = 4, l = 1 • maximum L (věrohodnost) Problém majáku odhad polohy majáku (x0,l)
maximum L (věrohodnost) Problém majáku odhad polohy majáku (x0,l) N = 1000 x0 = 4, l = 1
maximum L x0 = 4.05, l = 0.98 Problém majáku N = 1000 odhad polohy majáku (x0,l) x0 = 4, l = 1
Taylorův rozvoj ln(L)v bodě [x0,m, lm]: Problém majáku – odhad neurčitosti odhad polohy majáku (x0,l)
Problém majáku – odhad neurčitosti odhad polohy majáku (x0,l)
2D Gaussián: V – kovarianční matice Problém majáku – odhad neurčitosti N = 1000 odhad polohy majáku (x0,l)
Problém majáku – odhad neurčitosti N = 1000 odhad polohy majáku (x0,l) x0 = 4.05 ± 0.04, l = 0.98 ± 0.04 r (x0, l) = -0.08
Problém majáku – odhad neurčitosti N = 1000 odhad polohy majáku (x0,l) x0 = 4.05 ± 0.04, l = 0.98 ± 0.04
Dva parametry – odhad neurčitosti l e2 Q = k [x0,m,lm ] e1 x0
Taylorův rozvoj ln(L): • kvadratická aproximace posteriorní hustoty pravděpodobnosti ( m-rozměrný gaussián) • kovarianční matice Zobecnění pro m parametrů • posteriorní hustota pravděpodobnosti
......... Jacobiho matice 1m mm ......... Hesseova matice Zobecnění pro m parametrů • Taylorův rozvoj funkce v bodě x0