Download
1 / 19
230 likes | 340 Views
Learn about different types of electric motors including DC motors, brushed & brushless, AC motors, linear motors, and their applications. Explore the working principles, commutation techniques, and advantages of each motor type.

E N D
LINEAR INDUCTION MOTORS Y. LALITHA
Overview • DC Motors (Brushed and Brushless) • Brief Introduction to AC Motors • Linear Motors • Linear Induction Motors 2 Y.Lalitha
Electric Motor Basic Principles • Interaction between magnetic field and current carrying wire produces a force • Opposite of a generator 3 Y.Lalitha
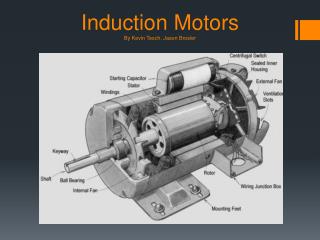
Conventional (Brushed) DC Motors • Permanent magnets for outer stator • Rotating coils for inner rotor • Commutation performed with metal contact brushes and contacts designed to reverse the polarity of the rotor as it reaches horizontal 4 Y.Lalitha
2 pole brushed DC motor commutation 5 Y.Lalitha
Conventional (Brushed) DC Motors • Common Applications: • Small/cheap devices such as toys, electric tooth brushes, small drills • Lab 3 • Pros: • Cheap, simple • Easy to control - speed is governed by the voltage and torque by the current through the armature • Cons: • Mechanical brushes - electrical noise, arcing, sparking, friction, wear, inefficient, shorting 6 Y.Lalitha
DC Motor considerations • Back EMF - every motor is also a generator • More current = more torque; more voltage = more speed • Load, torque, speed characteristics • Shunt-wound, series-wound (aka universal motor), compound DC motors 7 Y.Lalitha
Brushless DC Motors • Essential difference - commutation is performed electronically with controller rather than mechanically with brushes 8 Y.Lalitha
Brushless DC Motor Commutation • Commutation is performed electronically using a controller (e.g. HCS12 or logic circuit) • Similarity with stepper motor, but with less # poles • Needs rotor positional closed loop feedback: hall effect sensors, back EMF, photo transistors 9 Y.Lalitha
BLDC (3-Pole) Motor Connections • Has 3 leads instead of 2 like brushed DC • Delta (greater speed) and Wye (greater torque) stator windings Delta Wye 10 Y.Lalitha
Brushless DC Motors • Applications • CPU cooling fans • CD/DVD Players • Electric automobiles • Pros (compared to brushed DC) • Higher efficiency • Longer lifespan, low maintenance • Clean, fast, no sparking/issues with brushed contacts • Cons • Higher cost • More complex circuitry and requires a controller 11 Y.Lalitha
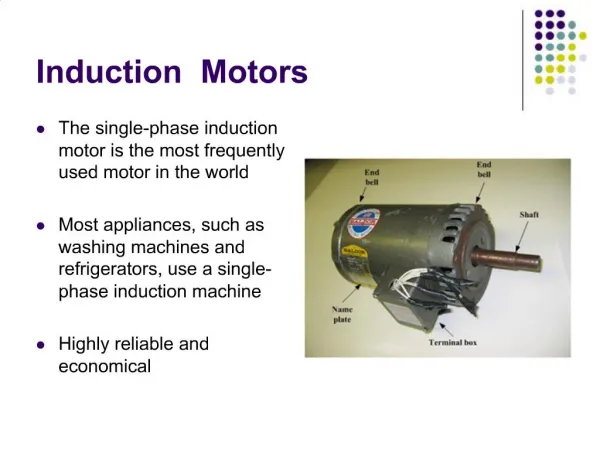
AC Motors Two main types of AC motor, Synchronous and Induction. Synchronous motors supply power to both the rotor and the stator, where induction motors only supply power to the stator coils, and rely on induction to generate torque. 12 Y.Lalitha
AC Induction Motors (3 Phase) • Use poly-phase (usually 3) AC current to create a rotating magnetic field on the stator • This induces a magnetic field on the rotor, which tries to follow stator - slipping required to produce torque • Workhorses of the industry - high powered applications 13 Y.Lalitha
AC induction Motors Induction motors only supply current to the stator, and rely on a second induced current in the rotor coils. This requires a relative speed between the rotating magnetic field and the rotor. If the rotor somehow matches or exceeds the magnetic field speed, there is condition called slip. Slip is required to produce torque, if there is no slip, there is no difference between the induced pole and the powered pole, and therefore no torque on the shaft. 14 Y.Lalitha
Synchronous AC Motors Current is applied to both the Rotor and the Stator. This allows for precise control (stepper motors), but requires mechanical brushes or slip rings to supply DC current to the rotor. There is no slip since the rotor does not rely on induction to produce torque. 15 Y.Lalitha
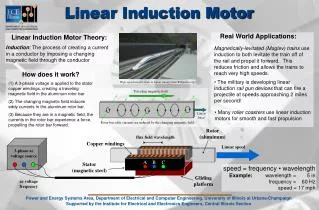
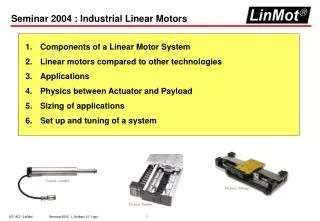
Linear Motors Linear motors are electric induction motors that produce motion in a straight line rather than rotational motion. In a traditional electric motor, the rotor (rotating part) spins inside the stator(static part); in a linear motor, the stator is unwrapped and laid out flat and the "rotor" moves past it in a straight line. Linear motors often use superconducting magnets, which are cooled to low temperatures to reduce power consumption
The basic principle behind the linear motor was discovered in 1895, but practical devices were not developed until 1947. During the 1950s, British electrical engineer Eric Laithwaite started to consider whether linear motors could be used in electric weaving machines. Laithwaite's research at Imperial College, London attracted international recognition in the 1960s following a speech to the Royal Institution entitled "Electrical Machines of the Future."
In the 1960s, Eric Laithwaite's research into linear motors led to renewed interest in the idea of a magnetically levitated or "maglev" train. • Around this time MIT scientist Henry Kolm proposed a "magnaplane" running on rails that could carry 20,000 people at 200 mph (320 kph). • This prompted a US research program and led to a working prototype that was tested in Colorado in 1967. • However, the US program ran into political difficulties and was shelved in 1975. • The early 1990s brought an ambitious proposal to link Las Vegas, Los Angeles, San Diego, and San Fransisco with a maglev railroad, but that project has since run into more political problems.
Interesting, right? This is just a sneak preview of the full presentation. We hope you like it! To see the rest of it, just click here to view it in full on PowerShow.com. Then, if you’d like, you can also log in to PowerShow.com to download the entire presentation for free.