Download
1 / 40
410 likes | 530 Views
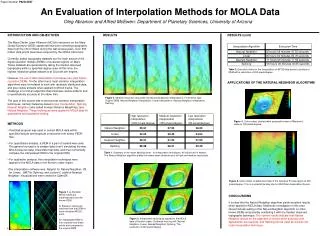
Learn about interpolation techniques like linear, polynomial, least squares, and Radial Basis Functions. Explore examples with Matlab code for better understanding and application in various contexts.

E N D
Interpolation Methods Robert A. Dalrymple Johns Hopkins University
Why Interpolation? • For discrete models of continuous systems, we need the ability to interpolate values in between discrete points. • Half of the SPH technique involves interpolation of values known at particles (or nodes).
Interpolation • To find the value of a function between known values. Consider the two pairs of values (x,y): (0.0, 1.0), (1.0, 2.0) What is y at x = 0.5? That is, what’s (0.5, y)?
Linear Interpolation • Given two points, (x1,y1), (x2,y2): Fit a straight line between the points. y(x) = a x +b a=(y2-y1)/(x2-x1), b= (y1 x2-y2 x1)/(x2-x1), Use this equation to find y values for any x1 < x < x2
Polynomial Interpolants Given N (=4) data points, Find the interpolating function that goes through the points: If there were N+1 data points, the function would be with N+1 unknown values, ai, of the Nth order polynomial
Polynomial Interpolant Force the interpolant through the four points to get four equations: Rewriting: The solution is found by inverting p
Example Data are: (0,2), (1,0.3975), (2, -0.1126), (3, -0.0986). Fitting a cubic polynomial through the four points gives:
Matlab code for polynomial fitting % the data to be interpolated (in 1D) x=[-0.2 .44 1.0 1.34 1.98 2.50 2.95 3.62 4.13 4.64 4.94]; y=[2.75 1.80 -1.52 -2.83 -1.62 1.49 2.98 0.81 -2.14 -2.93 -1.81]; plot(x,y,'bo') n=size(x,2) % CUBIC FIT p=[ones(1,n) x x.*x x.*(x.*x)]' a=p\y' %same as a=inv(p)*y' yp=p*a hold on; plot(x,yp,'k*') Note: linear and quadratic fit: redefine p
Polynomial Fit to Example Exact: red Polynomial fit: blue
Beware of Extrapolation Exact: red An Nth order polynomial has N roots!
Least Squares Interpolant For N points, we will have a fitting polynomial of order m < (N-1). The least squares fitting polynomial be similar to the exact fit form: Now p is N x m matrix. Since we have fewer unknown coefficient as data points, the interpolant cannot go through each point. Define the error as the amount of “miss” Sum of the (errors)2:
Least Squares Interpolant Minimizing the sum with respect to the coefficients a: Solving, This can be rewritten in this form, which introduces a pseudo-inverse. Reminder: for cubic fit
Question Show that the equation above leads to the following expression for the best fit straight line:
Matlab: Least-Squares Fit %the data to be interpolated (1d) x=[-0.2 .44 1.0 1.34 1.98 2.50 2.95 3.62 4.13 4.64 4.94]; y=[2.75 1.80 -1.52 -2.83 -1.62 1.49 2.98 0.81 -2.14 -2.93 -1.81]; plot(x,y,'bo') n=size(x,2) % CUBIC FIT p=[ones(1,n) x x.*x x.*(x.*x)]' pinverse=inv(p'*p)*p' a=pinverse*y' yp=p*a plot(x,yp,'k*')
Cubic Least Squares Example Data irregularly spaced x: -0.2 .44 1.0 1.34 1.98 2.50 2.95 3.62 4.13 4.64 4.94 y: 2.75 1.80 -1.52 -2.83 -1.62 1.49 2.98 0.81 -2.14 -2.93 -1.81
Least Squares Interpolant Cubic Least Squares Fit: * is the fitting polynomial o is the given data Exact
Piecewise Interpolation Piecewise polynomials: fit all points Linear: continuity in y+, y- (fit pairs of points) Quadratic: +continuity in slope Cubic splines: +continuity in second derivative RBF All of the above, but smoother
Radial Basis Functions Developed to interpolate 2-D data: think bathymetry. Given depths: , interpolate to a rectangular grid.
Radial Basis Functions 2-D data: For each position, there is an associated value: Radial basis function (located at each point): where is the distance from xj The radial basis function interpolant is:
RBF To find the unknown coefficients i, force the interpolant to go through the data points: where This gives N equations for the N unknown coefficients.
RBF Morse et al., 2001
Multiquadric RBF MQ: RMQ: Hardy, 1971; Kansa, 1990
RBF Example 11 (x,y) pairs: (0.2, 3.00), (0.38, 2.10), (1.07, -1.86), (1.29, -2.71), (1.84, -2.29), (2.31, 0.39), (3.12, 2.91), (3.46, 1.73), (4.12, -2.11), (4.32, -2.79), (4.84, -2.25) SAME AS BEFORE
RBF Errors Log10 [sqrt (mean squared errors)] versus c: Multiquadric
RBF Errors Log10 [ sqrt (mean squared errors)] versus c: Reciprocal Multiquadric
Consistency Consistency is the ability of an interpolating polynomial to reproduce a polynomial of a given order. The simplest consistency is constant consistency: reproduce unity. where, again, If gj(0) = 1, then a constraint results: Note: Not all RBFs have gj(0) = 1
RBFs and PDEs Solve a boundary value problem: The RBF interpolant is: N is the number of arbitrarily spaced points; the j are unknown coefficients to be found.
RBFs and PDEs Introduce the interpolant into the governing equation and boundary conditions: These are N equations for the N unknown constants, j
RBFs and PDEs (3) Problem with many RBF is that the N x N matrix that has to be inverted is fully populated. RBFs with small ‘footprints’ (Wendland, 2005) 1D: 3D: His notation: Advantages: matrix is sparse, but still N x N
Wendland 1-D RBF with Compact Support h=1 Max=1
Moving Least Squares Interpolant are monomials in x for 1D (1, x, x2, x3) x,y in 2D, e.g. (1, x, y, x2, xy, y2 ….) Note aj are functions ofx
Moving Least Squares Interpolant Define a weighted mean-squared error: where W(x-xi) is a weighting function that decays with increasing x-xi. Same as previous least squares approach, except for W(x-xi)
Weighting Function q=x/h
Moving Least Squares Interpolant Minimizing the weighted squared errors for the coefficients: , , ,
Moving Least Squares Interpolant Solving The final locally valid interpolant is:
% generate the data to be interpolated (1d) x=[-0.2 .44 1.0 1.34 1.98 2.50 2.95 3.62 4.13 4.64 4.94]; y=[2.75 1.80 -1.52 -2.83 -1.62 1.49 2.98 0.81 -2.14 -2.93 -1.81]; plot(x,y,'bo') n=size(x,2)% QUADRATIC FIT p=[ones(1,n) x x.*x]' xfit=0.30; sum=0.0 % compute msq error for it=1:18, % fiting at 18 points xfit=xfit+0.25; d=abs(xfit-x) for ic=1:n q=d(1,ic)/.51;% note 0.3 works for linear fit; 0.51 for quadratic if q <= 1. Wd(1,ic)=0.66*(1-1.5*q*q+0.75*q^3); elseif q <= 2. Wd(1,ic)=0.66*0.25*(2-q)^3; else Wd(1,ic)=0.0; end end Moving Least Squares (1)
MLS (2) Warray=diag(Wd); A=p'*(Warray*p) B=p'*Warray acoef=(inv(A)*B)*y' % QUADRATIC FIT yfit=acoef'*[1 xfit xfit*xfit]' hold on; plot(xfit, yfit,'k*') sum=sum+(3.*cos(2.*pi*xfit/3.0)-yfit)^2; end
MLS Fit to (Same) Irregular Data h=0.51 Given data: circles; MLS: *; exact: line
Varying h Values 1.0 .3 1.5 .5
Conclusions There are a variety of interpolation techniques for irregularly spaced data: • Polynomial Fits • Best Fit Polynomials • Piecewise Polynomials • Radial Basis Functions • Moving Least Squares