Download
1 / 14
140 likes | 158 Views
Explore the layout, functionality, and design of the HET Observatory Control System. Discover the networking infrastructure, hardware platforms, programming languages, and environmental data management employed to ensure efficient operations.

E N D
HET Observatory Control System Layout, Functionality and Design Jim Fowler HetDex Review McDonald Observatory 5 Dec 2007
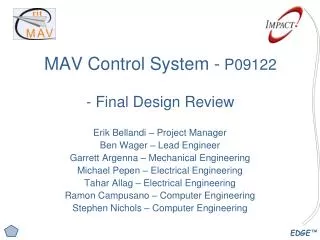
HET Software Interconnection 11/29/2007 J.R Fowler Ver 2.0 Telescope Science Tools Dome Tcs PI Tools Htopx Structure Iraf/Icex Hrs Tracker Baffle/Slide Environmental Lrs Guiders HetWeb Fif Mrs Johnson Controls Dimm DMI TTC Data Distribution Pmt Weather Server Dust Primary Mirror Control Weather Tower Dewpoint Sams SCS Engineering Mars Enclosure Temp/Wind Web Site Hefi Truss Temps Data Archives Weather Archive Infrastructure Operating Systems Third Party Software Network Web Hardware Platforms CMMS Security
Goal: Provide a secure and functional computing environment for acquiring and distributing science and engineering data • Network • Tcp/IP Ethernet, coax, fiber and wireless • Public/Private segments for security • 10/100/1000 Mbit switches for traffic isolation • Gateway and Firewall managed at HET • 84 hosts, ~29 directly involved science operations • Operating Systems • Windows 95/98/2000/XP/NT • Unix • LynxOS 2.3 • QNX • Solaris 5/7/8/10 • Linux • Redhat 7.3 • RHEL 3/5 • Siderus • Fedora • Hardware platforms • Sun • Dell • Numerous other vendors Infrastructure Operating Systems Third Party Software Network Web Security Hardware Platforms CMMS
Programming Languages • C • Fortran • Labview • Perl • Php • Iraf/CL • Conductor • SM • Tcl/Tk • csh/sh • awk/sed • Numerous equipment specific command languages, e.g. PMAC, dust monitor • Video (RS170 and webcams) and audio monitoring systems • System Services • Backups and archives • Web services • Compilers • System monitoring • Hardware spares and support Infrastructure Operating Systems Third Party Software Network Web Security Hardware Platforms CMMS
Goal: Provide data to monitor and improve the performance of HET systems. Provide information for pro-active and preventative maintenance. • Software to collect engineering and environmental data • Software to analyze data and determine state of system • Data presentation via web, email, or graphical displays • Provide for archival data access for long term trend analysis • Data Sources • Environmental e.g weather, internal environment • Tracker • Tcs • Guiders • TTC/DMI • Sams Engineering Web Site Data Archives Weather Archive
Goal: Provide environmental data to operators in order to maximize science data return and to make system safety decisions • Weather Tower • RS232 via fiber • Wind speed, wind direction, air temperature, relative humidity, barometric pressure • Campbell Scientific data logger • Dust monitors inside and outside enclosure, 6 channels each • Dew point monitors inside (and outside) enclosure • Enclosure louvers temperature sensors installed but not monitored, wind sensors on site but not installed • Truss temperatures, enclosure temperatures, spectrograph temperatures, tracker motor temperatures • Ladder temperatures in enclosure • Differential Image Motion Monitor • Internet access to National Weather Service and other predictive data sources • Central environmental data servers provides real time access to most data • All environmental data is logged in ascii text files • Archive data mostly accessible via the web Environmental Johnson Controls Dimm Weather Server Dust Weather Tower Dewpoint Enclosure Temp/Wind Truss Temps
Science Tools • Goal: Provide for receipt of target lists, target observation, data dissemination, and data archive. Provide for feedback to/from principal investigators • Phase II files, plan.db, TSL language • NOSS/Htopx • HRS, LRS, MRS, translation slide, FIF • Environmental data used to determine appropriate science • data distribution via rhea in Austin • tape drives and USB disks for data archive • Instruments programmed in Iraf/CL, Labview and Conductor • Support software written in Iraf/CL, fortran, Perl, C, Php, etc. • Not much commonality between HRS/LRS and MRS • No interconnectivity between MRS and Tcs PI Tools Htopx Iraf/Icex Hrs Lrs HetWeb Mrs Data Distribution Pmt
Goal: Provide active control of the primary mirror, M1, to achieve an image quality within the specification of the optical error budget • Sams – Segment Alignment Maintenance System • Mars – Mirror Alignment Recovery System • Hefi – HET Extra-Focal Instrument • Scs – Segment Control System • Dmi – Distance Measuring Interferometer • Labview, C, Tcl/Tk • Network communications • No single user interface, operator must monitor multiple windows Primary Mirror Control Sams SCS Mars Hefi
Primary Mirror Control Loops 11/25/2007 J.R. Fowler Ver 2.0 Mars/Hefi Primary Mirror Segment Electronics Hi Jim, I just have a quick question… Actuators Sams Cluster Controller DMI Brick Edge Sensor SCS TS Products Controller TO Console
Telescope Dome Tcs Structure Tracker Baffle/Slide Guiders Fif DMI TTC • Goal: Provide tools to properly point and track the telescope. Maintain proper relationship between the tracker and the primary mirror and between the tracker and the sky • Tcs, Tracker, Structure • Dome (shutter) • Guiders (3x) • Dmi, Ttc • Fif, moving baffle, translation slide • C, Labview, Tcl/Tk, X Windows • Tcp/IP sockets, RS232, SCSI, USB, ISA bus communications • Specialized hardware, PMAC, counter/timer modules • Requires accurate time, GPS w/ntp, 1pps signal • Guiders and mount models required for alignment with sky • Dmi/Ttc maintain relationship between tracker and mirror
TCS Internal Block Diagram Main_TH – runs every 50 msec, process command queue. Time_Update_TH – run every 50msec , update global time variables for UTtime, Julian date/time, trigger high speed and low speed threads at appropriate time. High_Speed_TH – run every 50msec, update tracker position, update other time coordinates, TT, MJD, LST, trigger Gui_Display_TH. Low_Speed_TH – runs every second, read weather data, check for traffic to various sockets and trigger sockets if necessary, check if its time to stop structure motion. Gui_Display_TH – build gui packets 5x per second to clients who have requested them Gui_Socket_TH – wait for clients to connect, fork Read_Server_TH and Write_Server_TH threads for each. Read_Server_TH – read from client Write_Server_TH – write to client
Tracker Internal Block Diagram 19 Internal Threads: Local Display Synchronous – display position once per second Local Display Asynchronous – display warning messages Error Log – write error messages from threads to error log on disk CTM 1PPS – deal with the 1pps interrupt, update week second time count Local Cmd – process commands from local interface/keyboard Net Cmd – process commands from network socket connection Pmac Write – write commands to either the XY or Hex Pmac Pmac Read XY – read command response from XY Pmac dual ported ram Pmac Read Hex – read command response from Hex Pmac dual ported ram Encoder Data – log various information when commanded, not used Tip Send – send data to the tip/tilt meter, not used Tip Recv – recv data from the tip/tilt meter, not used Trajectory Convert – upon receipt of trajectory data, apply native mount and hexapod conversion Trajectory XY Rotary Buffer – download points to the XY Pmac rotary buffer Trajectory Hex Rotary Buffer – download points to the Hex Pmac rotary buffer Trajectory Time – determine if it is time for a trajectory to start, run every 10 msec GNC Offsets – apply corrections to the current interpolated positions GNC First Order Hold – apply corrections to masterhand wheel port on Pmacs Data Gather – collect data from dual ported ram and put into shared memory 6 Processes: ts_exec – main process with all the threads cor_exec – process corrections received on the correction socket, pass to the correction queue for GNC Offsets thread. net_exec – process commands received on the net command socket, pass to the network queue for Net Cmd thread. trj_exec --- process trajectories received on the trajectory socket, pass to the trajectory queue for Trajectory Convert. mon_exec – send monitor information to client socket. sta_exec – send error/status information to client socket. 9 internal queues for inter-process communications 5 sockets for client communications Shared memory for global data between threads
Interfaces: User and Communications User: All systems have local graphical or command line interfaces Most systems support remote display of graphical interfaces Many system support remote clients and displays All graphical displays combine both engineering and observing information. Some displays used only for one or two pieces of information No integration of observing/engineering information in one location Graphical interfaces written in X Windows, Tcl/Tk, Labview Communications: Most systems support a client/server model of operations usually multiple remote clients may connect Primarily TCP/IP socket based but some RS232/RS485 command/data transfer is usually via ASCII text strings Tcs/Tss uses binary protocol Interface Communications Documents exist for Tss, Structure, Scs, Dome, Weather, Sams exists partially for Tcs (developed as I work through the code) does not exist for Dmi, Ttc, Guiders (3x), baffle/slide, Mars, Hefi