Download
1 / 16
160 likes | 279 Views
结构图三种基本形式. G 1. G 1. G 1. G 2. G 2. G 2. G 1. G 1. G 2. G 1. G 2. G 2. G 1. 1+. 串 联. 并 联. 反 馈. 结构图等效变换方法. 1 三种典型结构可直接用公式. 1 不是 典型结构 不可 直接用公式. 2 相邻综合点可互换位置. 3 相邻引出点可互换位置. 2 引出点综合点 相邻, 不可 互换位置. 注意事项:. 引出点移动. H 2. G 3. G 4. G 2. G 1. 1. H 2. G 4. H 3.

E N D
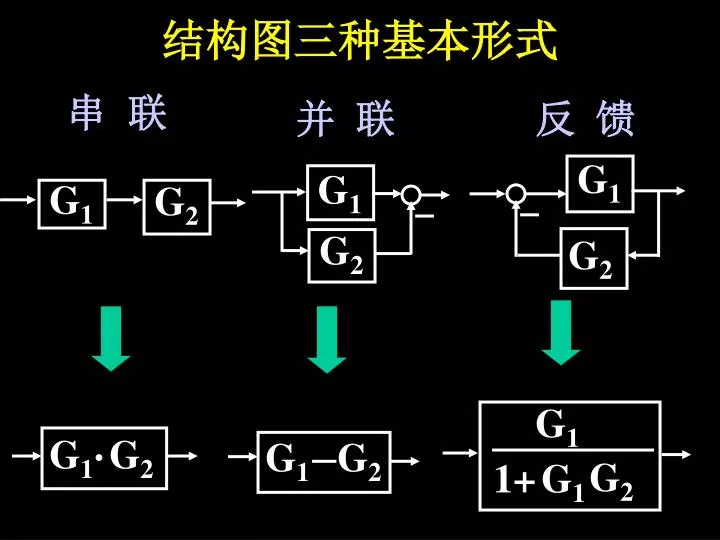
结构图三种基本形式 G1 G1 G1 G2 G2 G2 G1 G1 G2 G1 G2 G2 G1 1+ 串 联 并 联 反 馈
结构图等效变换方法 1 三种典型结构可直接用公式 1 不是典型结构不可直接用公式 2 相邻综合点可互换位置 3 相邻引出点可互换位置 2 引出点综合点相邻,不可互换位置 注意事项:
引出点移动 H2 G3 G4 G2 G1 1 H2 G4 H3 G3 G4 G1 G2 H1 H3 H1 a b
综合点移动 G3 G3 G1 G1 G2 G2 H1 H1 G1 向同类移动
作用分解 G4 G1 G2 G3 H3 H1 G4 G1 G2 G3 H3 H1 H3 H1
梅逊公式介绍 R-C : ∑Pk△k C(s) = R(s) △ △称为系统特征式 所有单独回路增益之和 ∑La — ∑LbLc—所有两两互不接触回路增益乘积之和 ∑LdLeLf—所有三个互不接触回路增益乘积之和 △k称为第k条前向通路的余子式 去掉第k条前向通路后所求的△ △=1- ∑La+ ∑LbLc-∑LdLeLf+… 其中: Pk—从R(s)到C(s)的第k条前向通路传递函数 求法:
梅逊公式例R-C G4(s) G1(s) G2(s) G3(s) R(s) C(s) H3(s) H1(s) △1=1 △2=1+G1H1 G4(s) G4(s) L1L2= (–G1H1) (–G3H3) = G1G3H1H3 L3= – G1G2G3H3H1 G1(s) G1(s) G1(s) G3(s) G3(s) G2(s) G2(s) G2(s) G3(s) G3(s) G3(s) P2= G4G3 P1=G1G2G3 L4= – G4G3 L2= – G3 H3 L1= –G1 H1 L1L4=(–G1H1)(–G4G3)=G1G3G4H1 L5 = – G1G2G3 C(s) =? R(s)
梅逊公式求C(s) N(s) G3(s) C(s) R(s) E(S) G2(s) G1(s) H2(s) H1(s) H3(s) L1= G1H1 L2= –G2H2 L3= –G1G2H3 L1L2= (G1H1)(-G 2 H2 ) R(s)[ ] G3G2 (1-G1H1) +G1G2 + G2 N(s) C(s)= 1- G1H1+ G2H2+ G1G2H3-G1H1G2 H2
梅逊公式求E(s) N(s) G3(s) C(s) R(s) E(S) G2(s) G1(s) H2(s) H1(s) H3(s) E(s)= 1- G1H1+ G2H2+ G1G2H3-G1H1G2 H2
梅逊公式求E(s) N(s) G3(s) C(s) R(s) G2(s) G1(s) H2(s) H1(s) H3(s) E(S) P1=1 △1=1+G2H2 P1△1= ? (1+G2H2) + E(s)= 1- G1H1+ G2H2+ G1G2H3-G1H1G2 H2
梅逊公式求E(s) G3(s) C(s) R(s) E(S) G1(s) G2(s) H2(s) H1(s) H3(s) (1+G2H2) E(s)= 1- G1H1+ G2H2+ G1G2H3-G1H1G2 H2 +
梅逊公式求E(s) G3(s) G1(s) C(s) R(s) E(S) G2(s) H2(s) H1(s) H3(s) (1+G2H2) + E(s)= 1- G1H1+ G2H2+ G1G2H3-G1H1G2 H2 P2= - G3G2H3 △2= 1 P2△2=? R(s)[ ] (- G3G2H3)
梅逊公式求E(s) G3(s) G1(s) C(s) R(s) E(S) G2(s) H2(s) H1(s) N(s) H3(s) P2= - G3G2H3 △2= 1 P2△2=? P1= –G2H3 △1= 1 R(s)[ ] (1+G2H2) (- G3G2H3) (–G2H3) N(s) + + E(s)= 1- G1H1+ G2H2+ G1G2H3-G1H1G2 H2
信号流图 e g c a d 1 b R(s) C(s) f h 四个单独回路,两个回路互不接触 前向通路两条 C(s) R(s) (1–bg) ed abcd + = – af – bg – ch – ehgf afch + 1
功放k3 +15v -15v +15v -15v -k2 -k1 SM TG 习题2-15(p72图2-63) 30k 20k 10k 10k ui u1 – ua u2 + uo 10k 10k ut 位置随动系统原理图
km 3 k3 2 3 S(Tms+1) kts 5.21 5.21 习题2-15方块图 K0=30v/330o=1/11(伏/度)=5.21(伏/弧度) K1=3 k2=2 α=1+Rf/Ri=1+20/10=3 ui uo ua u1 u2 ut
