Download
1 / 21
210 likes | 390 Views
Generic Distributed Algorithms for Self-Reconfiguring Robots. Keith Kotay and Daniela Rus MIT Computer Science and Artificial Intelligence Laboratory. Self-Reconfiguring Robot. Multiple functionalities Form follows function. Advantages Versatile Robust Extensible. Methodology.

E N D
Generic Distributed Algorithms for Self-Reconfiguring Robots Keith Kotay and Daniela Rus MIT Computer Science and Artificial Intelligence Laboratory
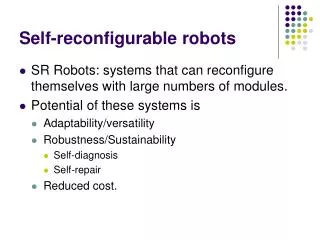
Self-Reconfiguring Robot • Multiple functionalities • Form follows function • Advantages • Versatile • Robust • Extensible MIT CSAIL
Methodology • Generic distributed algorithms • Cellular automata paradigm • Non-persistent modules • Proposed for self-reconfiguring robots by Hosokawa et al. (ICRA 1998) • Synchronous update model MIT CSAIL
Methodology • Approach • Use abstract module with simple motions • Create rule sets using only local information • Prove rule sets produce correct reconfigurations • Instantiate rule sets onto real systems MIT CSAIL
Methodology • Approach • Use abstract module with simple motions • Create rule sets using only local information • Prove rule sets produce correct reconfigurations • Instantiate rule sets onto real systems MIT CSAIL
Methodology • Approach • Use abstract module with simple motions • Create rule sets using only local information • Prove rule sets produce correct reconfigurations • Instantiate rule sets onto real systems • Proof methods • Logical argument • Graph properties • Statistical argument • Bounds size of error region with some confidence MIT CSAIL
Methodology • Approach • Use abstract module with simple motions • Create rule sets using only local information • Prove rule sets produce correct reconfigurations • Instantiate rule sets onto real systems Metamorphic Module – Chirikjian et al. Fracta Module – Murata et al. Crystal Module – Rus et al. MIT CSAIL
Locomotion Rule Set(ICRA 2002) MIT CSAIL
Locomotion Example (ICRA 2002) MIT CSAIL
Self-Assembly Example 1 • Rule set • 19 rules: 9 x 2 (east, west), 1 other • Internal state: direction, location • Rows act independently MIT CSAIL
Self-Assembly Example 2 • Rule set • 19 rules: 9 x 2 (east, west), 1 other • Internal state: direction, location, goal shape • Rows act independently • Works for convex 2½-D shapes MIT CSAIL
Reconfiguration Algorithm • Two-phase algorithm • Non-local phase • Reconfigure so that each row has the correct number of modules • Align rows with the goal shape • Local phase • Locomotion to the goal shape location • Self-assembly into the goal shape MIT CSAIL
Reconfiguration Algorithm • Rule set for non-convex shapes • 33 rules • 2½-D start and goal shapes • Layers must be connected components MIT CSAIL
Algorithm Correctness Non-convex shape rule set MIT CSAIL
Reconfiguration Algorithm Ruleset developed by Kohji Tomita, AIST MIT CSAIL
Reconfiguration Algorithm Old A-2 Rule New A-2 Rule New Stopping Rule MIT CSAIL
Reconfiguration Algorithm • New non-convex shape rule set • 66 rules • 2½-D start and goal shapes • Layers must be connected components • Reduction in structure voids MIT CSAIL
Reconfiguration Algorithm • New non-convex shape rule set • 66 rules • 2½-D start and limited 3-D goal shapes • Layers must be connected components • Reduction in structure voids MIT CSAIL
Algorithm Correctness New non-convex shape rule set MIT CSAIL
Conclusion • Generic, distributed approach • Abstract module • Local rules • Algorithm correctness • Instantiation to real hardware • Algorithms • Self-assembly of convex 2½-D shapes • Self-assembly of non-convex 2½-D shapes • Extension to limited 3-D goal shapes MIT CSAIL
Acknowledgements • National Science Foundation • Awards IRI-9714332, EIA-9901589, IIS-9818299, IIS-9912193, and EIA-0202789 • Office of Naval Research • Award N00014-01-1-0675 • Project Oxygen at MIT • Intel • Boeing • Zack Butler and Kohji Tomita MIT CSAIL