Download
1 / 29
1.91k likes | 3.52k Views
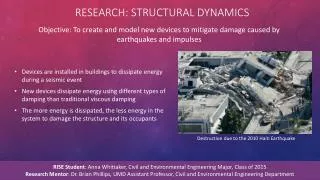
BASIC CONCEPTS ON STRUCTURAL DYNAMICS. AQUIB ANSARI ASSISTANT PROFESSOR A.C.E.T Nagpur. What is Dynamics ?. The word dynamic simply means “changes with time”. Basic difference between static and dynamic loading. P(t). P.

E N D
BASIC CONCEPTS ON STRUCTURAL DYNAMICS AQUIB ANSARI ASSISTANT PROFESSOR A.C.E.T Nagpur
What is Dynamics ? The word dynamic simply means “changes with time”
Basic difference between static and dynamic loading P(t) P Accelerations producing inertia forces (inertia forces form a significant portion of load equilibrated by the internal elastic forces of the structure) Resistance due to internal elastic forces of structure In static problem: Response due to static loading is displacement only. In dynamic problem: Response due to dynamic loading is displacement, velocity and acceleration. Static Dynamic
Most Common Causes Dynamic Effect In The Structure • Initial conditions: Initial conditions such as velocity and displacement produce dynamic effect in the system. Ex: Consider a lift moving up or down with an initial velocity. When the lift is suddenly stopped , the cabin begin to vibrate up and down since it posses initial velocity. • Applied forces: Some times vibration in the system is produced due to application of external forces. Ex: i) A building subjected to bomb blast or wind forces ii) Machine foundation. • Support motions : Structures are often subjected to vibration due to influence of support motions. Ex: Earthquake motion.
Basic Concepts of Structural dynamics Vibration and oscillation: If motion of the structure is oscillating (pendulum) or reciprocatory along with deformation of the structure, it is termed as VIBRATION. In case there is no deformation which implies only rigid body motion, it is termed as OSCILLATION. Free vibration: Vibration of a system which is initiated by a force which is subsequently withdrawn. Hence this vibration occurs without the external force. Forced Vibration: If the external force is also involved during vibration, then it is forced vibration.
Basic Concepts of Structural dynamics Damping: All real life structures, when subjected to vibration resist it. Due to this the amplitude of the vibration gradually, reduces with respect to time. In case of free vibration, the motion is damped out eventually. Damping forces depend on a number of factors and it is very difficult to quantify them. The commonly used representation is viscous damping wherein damping force is expressed as Fd=C x. where x. = velocity and C=damping constant.
Dynamic Degrees of Freedom The number of independent displacement components that must be considered to represent the effects of allsignificant inertia forcesof a structure. Depending upon the co-ordinates to describe the motion, we have 1. Single degree of freedom system (SDoF). 2. Multiple degree of freedom (MDoF). 3. Continuous system.
Dynamic Degrees of Freedom Single Degree of Freedom: If a single coordinate is sufficient to define the position or geometry of the mass of the system at any instant of time is called single or one degree of freedom system. Multiple degree of freedom (MDoF): If more than one independent coordinate is required to completely specify the position or geometry of different masses of the system at any instant of time, is called multiple degrees of freedom system. • Continuous system: If the mass of a system may be considered to be distributed over its entire length as shown in figure, in which the mass is considered to have infinite degrees of freedom, it is referred to as a continuous system. It is also known as distributed system.
Single Degree of Freedom Vertical translation Horizontal translation Horizontal translation Rotation
Multiple Degrees of Freedom Degrees of freedom: –If more than one independent coordinate is required to completely specify the position or geometry of different masses of the system at any instant of time, is called multiple degrees of freedom system. Example for MDOF system
Continuous system: Degrees of freedom: –If the mass of a system may be considered to be distributed over its entire length as shown in figure, in which the mass is considered to have infinite degrees of freedom, it is referred to as a continuous system. It is also known as distributed system. –Example for continuous system:
x k m P(t) c Mathematical model - SDOF System F = m × x·· = p(t) –cx·–kx mx··+ cx·+ kx = p(t) Mass element ,m - representing the mass and inertial characteristic of the structure Spring element ,k - representing the elastic restoring force and potential energy capacity of the structure. Dashpot, c - representing the frictional characteristics and energy losses of the structure Excitation force, P(t) -represents the external force acting on structure.
Mathematical model - SDOF System • Undamped (C =0 &P(t)=0) • Free Vibration • Damped ( C0 &P(t)=0) • Undamped (C =0 &P(t) 0) • 2. Forced Vibration • Damped ( C0 &P(t) 0)
Equation of Motion - SDOF System Differential equation describing the motion is known as equation of motion. 1.Simple Harmonic motion 2. Newtown’s Law of motion 3. Energy methods 4.Rayleights method 5.D’alembert’s method
Simple Harmonic motion method: If the acceleration of a particle in a rectilinear motion is always proportional to the distance of the particle from a fixed point on the path and is directed towards the fixed point, then the particle is said to be in SHM. SHM is the simplest form of periodic motion. •In differential equation form, SHM is represented as 𝑥 ∝−𝑥 −−−(1)
Newton’s second law of motion: The rate of change of momentum is proportional to the impressed forces and takes place in the direction in which the force acts. Consider a spring – mass system of figure which is assumed to move only along the vertical direction. It has only one degree of freedom, because its motion is described by a single coordinate x.
Energy method: Conservative system: Total sum of energy is constant at all time.
Rayleigh’s method: Maximum K.E. at the equilibrium position is equal to the maximum potential energy at the extreme position.
D’Alembert’s method: D’Alemberts principle states that ‘a system may be in dynamic equilibrium by adding to the external forces, an imaginary force, which is commonly known as the inertia force’. Using D’Alembert’s principle, to bring the body to a dynamic equilibrium position, the inertia force ‘𝑚𝑥 is to be added in the direction opposite to the direction of motion.
x k m P(t) =0 Free Vibration of Undamped - SDOF System • mx··+ cx·+ kx = p(t)
Free Vibration of Undamped - SDOF System Amplitude of motion x vo x 0 t t Vo = X.o & = X =initial displacement V =initial velocity 0 or 0 =p is called circular frequency or angular frequency of vibration (Rad/s) where,
k m c x Free Vibration of damped SDOF systems where, is called circular frequency or angular frequency of vibration (Rad/s) (Dimensionless parameter) - A
Free Vibration of damped SDOF systems Solution of Eq.(A) may be obtained by a function in the form x = ert where r is a constant to be determined. Substituting this into (A) we obtain, In order for this equation to be valid for all values of t, or
Free Vibration of damped SDOF systems Thus and are solutions and, provided r1 and r2 are different from one another, the complete solution is The constants of integration c1 and c2 must be evaluated from the initial conditions of the motion. Note that for >1, r1 and r2 are real and negative for <1, r1 and r2 are imaginary and for =1, r1= r2= -p Solution depends on whether is smaller than, greater than, or equal to one.
Free Vibration of damped SDOF systems For (Light Damping) : (B) where, ‘A’ and ‘B’ are related to the initial conditions as follows In other words, Eqn.B can also be written as,
Extremumpoint( ) Td = 2π / pd Point of tangency ( ) x xn Xn+1 t
x xo o t For (Heavy Damping) Such system is said to be over damped or super critically damped. i.e., the response equation will be sum of two exponentially decaying curve In this case r1 and r2 are real negative roots.
For Such system is said to be critically damped. With initial conditions, The value of ‘c’ for which Is known as the critical coefficient of damping Therefore,