Download
1 / 32
320 likes | 397 Views
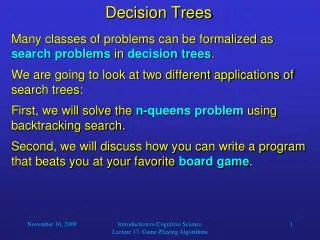
Decision Trees and Influences. Ryan O’Donnell - Microsoft. Mike Saks - Rutgers. Oded Schramm - Microsoft. Rocco Servedio - Columbia. Part I: Decision trees have large influences. Printer troubleshooter. Does anything print?. Right size paper?. Can print from Notepad?. Network printer?.

E N D
Decision Trees and Influences Ryan O’Donnell - Microsoft Mike Saks - Rutgers Oded Schramm - Microsoft Rocco Servedio - Columbia
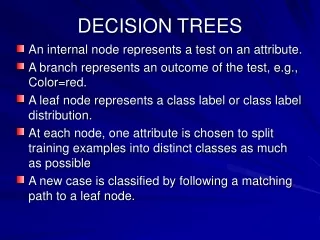
Printer troubleshooter Does anything print? Right size paper? Can print from Notepad? Network printer? Printer mis-setup? File too complicated? Solved Solved Driver OK? Driver OK? Solved Solved Call tech support
Decision tree complexity f : {Attr1} × {Attr2} × ∙∙∙ × {Attrn} → {−1,1}. What’s the “best” DT for f, and how to find it? Depth = worst case # of questions. Expected depth = avg. # of questions.
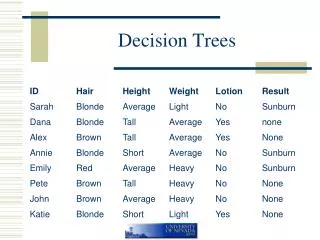
Building decision trees • Identify the most ‘influential’/‘decisive’/‘relevant’ variable. • Put it at the root. • Recursively build DTs for its children. Almost all real-world learning algs based on this – CART, C4.5, … Almost no theoretical (PAC-style) learning algs based on this – [Blum92, KM93, BBVKV97, PTF-folklore, OS04] – no; [EH89, SJ03] – sorta. Conj’d to be good for some problems (e.g., percolation [SS04]) but unprovable…
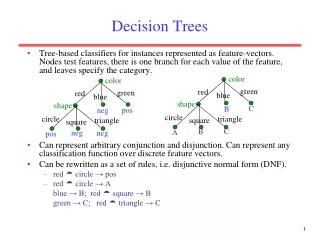
x2 x3 Boolean DTs f : {−1,1}n → {−1,1}. D(f) = min depth of a DT for f. 0 ≤ D(f) ≤ n. x1 x2 Maj3 −1 x3 1 −1 1 −1 1
Boolean DTs • {−1,1}n viewed as a probability space, with uniform probability distribution. • uniformly random path down a DT, plus a uniformly random setting of the unqueried variables, defines a uniformly random input • expected depth : δ(f).
Influences influence of coordinate j on f = the probability that xj is relevant for f Ij(f) = Pr[ f(x) ≠ f(x (⊕j)) ]. 0 ≤ Ij(f) ≤ 1.
Main question: If a function f has a “shallow” decision tree, does it have a variable with “significant” influence?
Main question: No. But for a silly reason: Suppose f is highly biased; say Pr[f = 1] = p ≪ 1. Then for any j, Ij(f) = Pr[f(x) = 1, f(x(j)) = −1] + Pr[f(x) = −1, f(x(j)) = 1] ≤ Pr[f(x) = 1] + Pr[f(x(j)) = 1] ≤ p + p = 2p.
Variance ⇒Influences are always at most 2 min{p,q}. Analytically nicer expression: Var[f]. • Var[f] = E[f2] – E[f]2 = 1 – (p – q)2 = 1 – (2p − 1)2 = 4p(1 – p) = 4pq. • 2 min{p,q} ≤ 4pq ≤ 4 min{p,q}. • It’s 1 for balanced functions. So Ij(f) ≤ Var[f], and it is fair to say Ij(f) is “significant” if it’s a significant fraction of Var[f].
Main question: If a function f has a “shallow” decision tree,does it have a variable with influence at leasta “significant” fraction of Var[f]?
Notation τ(d) = min max { Ij(f) / Var[f] }. f : D(f) ≤ d j
n Σ j = 1 Known lower bounds Suppose f : {−1,1}n → {−1,1}. • An elementary old inequality states Var[f] ≤ Ij(f). Thus f has a variable with influence at least Var[f]/n. • A deep inequality of [KKL88] shows there is always a coord. j such that Ij(f) ≥ Var[f] · Ω(log n / n). If D(f) = d then f really has at most 2d variables. Hence we get τ(d) ≥ 1/2d from the first, and τ(d) ≥ Ω(d/2d) from KKL.
x1 x3 x2 −1 1 1 −1 Our result τ(d) ≥ 1/d. This is tight: Then Var[SEL] = 1, d = 2, all three variables have infl. ½. (Form recursive version, SEL(SEL, SEL, SEL) etc., gives Var 1 fcn with d = 2h, all influences 2−h for any h.) “SEL”
n n n Σ Σ Σ j = 1 j = 1 j = 1 Our actual main theorem Given a decision tree f, let δj(f) = Pr[tree queries xj]. Then Var[f] ≤ δj(f)Ij(f). Cor: Fix the tree with smallest expected depth. Then δj(f) = E[depth of a path] =: δ(f) ≤ D(f). ⇒ Var[f] ≤ max Ij ·δj = max Ij · δ(f) ⇒ max Ij ≥ Var[f] / δ(f) ≥ Var[f] / D(f).
Proof Pick a random path in the tree. This gives some set of variables, P = (xJ1, … , xJT), along with an assignment to them, βP. Call the remaining set of variables P and pick a random assignment βP for them too. Let X be the (uniformly random string) given by combining these two assignments, (βP, βP). Also, define JT+1, … , Jn = ┴.
P P Proof Let β’P be an independent random asgn to vbls in P. Let Z = (β’P, βP). Note: Z is also uniformly random. JT+1= ··· = Jn = ┴ xJ1= –1 J1 J2 J3 JT xJ2= 1 X = (-1, 1, -1, …, 1, ) 1, -1, 1, -1 xJ3= -1 Z = ( , ) 1,-1, -1, …,-1 1, -1, 1, -1 xJT= 1 –1
Proof Finally, for t = 0…T, let Yt be the same string as X, except that Z’s assignments (β’P) for variables xJ1, … , xJt are swapped in. Note: Y0 = X, YT = Z. Y0 = X = (-1, 1, -1, …, 1, 1, -1, 1, -1 ) Y1= ( 1, 1, -1, …, 1, 1, -1, 1, -1 ) Y2 = ( 1,-1, -1, …, 1, 1, -1, 1, -1 ) · · · · YT = Z = ( 1,-1, -1, …,-1, 1, -1, 1, -1 ) Also define YT+1 = · · · = Yn = Z.
Σ Σ Σ Σ Σ Σ Σ t = 1..n t = 1..n t = 1..n t = 1..n j = 1..n t = 1..n j = 1..n Var[f] = E[f2] – E[f]2 = E[ f(X)f(X) ] – E[ f(X)f(Z) ] = E[ f(X)f(Y0) – f(X)f(Yn) ] = E[ f(X) (f(Yt−1) – f(Yt)) ] ≤ E[ |f(Yt−1) – f(Yt)| ] = 2 Pr[f(Yt−1) ≠ f(Yt)] = Pr[Jt = j] · 2 Pr[f(Yt−1) ≠ f(Yt) | Jt = j] = Pr[Jt = j] · 2 Pr[f(Yt−1) ≠ f(Yt) | Jt = j]
Σ Σ j = 1..n t = 1..n Proof … = Pr[Jt = j] · 2 Pr[f(Yt−1) ≠ f(Yt) | Jt = j] Utterly Crucial Observation: Conditioned on Jt = j, (Yt−1, Yt) are jointly distributed exactly as (W, W’), where W is uniformly random, and W’ is W with jth bit rerandomized.
P P JT+1= ··· = Jn = ┴ xJ1= –1 J1 J2 J3 JT xJ2= 1 Y0 = X = (-1, 1, -1, …, 1, 1, -1, 1, -1 ) Y1= ( 1, 1, -1, …, 1, 1, -1, 1, -1 ) Y2 = ( 1,-1, -1, …, 1, 1, -1, 1, -1 ) · · · · YT = Z = ( 1,-1, -1, …,-1, 1, -1, 1, -1 ) X = (-1, 1, -1, …, 1, ) 1, -1, 1, -1 xJ3= 1 Z = ( , ) 1,-1, -1, …,-1 1, -1, 1, -1 xJT= 1 –1
Σ Σ Σ Σ Σ Σ Σ Σ Σ j = 1..n j = 1..n j = 1..n j = 1..n t = 1..n t = 1..n j = 1..n t = 1..n t = 1..n Proof … = Pr[Jt = j] · 2 Pr[f(Yt−1) ≠ f(Yt) | Jt = j] = Pr[Jt = j] · 2 Pr[f(W) ≠ f(W’)] = Pr[Jt = j] · Ij(f) = Ij · Pr[Jt = j] = Ij δj.
Monotone graph properties v2 Consider graphs on v vertices; let n = (). “Nontrivial monotone graph property”: • “nontrivial property”: a (nonempty, nonfull) subset of all v-vertex graphs • “graph property”: closed under permutations of the vertices ( no edge is ‘distinguished’) • monotone: adding edges can only put you into the property, not take you out e.g.: Contains-A-Triangle, Connected, Has-Hamiltonian-Path, Non-Planar, Has-at-least-n/2-edges, …
Aanderaa-Karp-Rosenberg conj. Every nontrivial monotone graph propery has D(f) = n. [Rivest-Vuillemin-75]: ≥ v2/16. [Kleitman-Kwiatowski-80] ≥ v2/9. [Kahn-Saks-Sturtevant-84] ≥ n/2, = n, if v is a prime power. [Topology + group theory!] [Yao-88] = n in the bipartite case.
Randomized DTs • Have ‘coin flip’ nodes in the trees that cost nothing. • Or, probability distribution over deterministic DTs. Note: We want both 0-sided error and worst-case input. R(f) = min, over randomized DTs that compute f with 0-error, of max over inputs x, of expected # of queries. The expectation is only over the DT’s internal coins.
Maj3: D(Maj3) = 3. Pick two inputs at random, check if they’re the same. If not, check the 3rd. R(Maj3) ≤ 8/3. Let f = recursive-Maj3 [Maj3 (Maj3 , Maj3 , Maj3 ), etc…] For depth-h version (n = 3h), D(f) = 3h. R(f) ≤ (8/3)h. (Not best possible…!)
Randomized AKR / Yao conj. Yao conjectured in ’77 that every nontrivial monotone graph property f has R(f) ≥ Ω(v2). Lower bound Ω( · )Who v [Yao-77] v log 1/12 v [Yao-87] v5/4 [King-88] v4/3 [Hajnal-91] v4/3 log 1/3 v [Chakrabarti-Khot-01] min{ v/p, v2/log v } [Fried.-Kahn-Wigd.-02] v4/3 / p1/3 [us]
Outline • Extend main inequality to the p-biased case. (Then LHS is 1.) • Use Yao’s minmax principle: Show that under p-biased {−1,1}n, δ = Σ δj = avg # queries is large for any tree. • Main inequality: max influence is small ⇒ δ is large. • Graph property all vbls have the same influence. • Hence: sum of influences is small ⇒ δ is large. • [OS04]: f monotone ⇒ sum of influences ≤ √δ. • Hence: sum of influences is large ⇒ δ is large. • So either way, δ is large.
Generalizing the inequality n Σ Var[f] ≤ δj(f)Ij(f). Generalizations (which basically require no proof change): • holds for randomized DTs • holds for randomized “subcube partitions” • holds for functions on any product probability space f : Ω1× ∙∙∙ ×Ωn → {−1,1} (with notion of “influence” suitably generalized) • holds for real-valued functions with (necessary) loss of a factor, at most √δ j = 1
Closing thought It’s funny that our bound gets stuck roughly at the same level as Hajnal / Chakrabarti-Khot, n2/3 = v4/3. Note that n2/3 [I believe] cannot be improved by more than a log factor merely for monotone transitive functions, due to [BSW04]. Thus to get better than v4/3 for monotone graph properties, you must use the fact that it’s a graph property. Chakrabarti-Khot does definitely use the fact that it’s a graph property (all sorts of graph packing lemmas). Or do they? Since they get stuck at essentially v4/3, I wonder if there’s any chance their result doesn’t truly need the fact that it’s a graph property…