Download
1 / 3
30 likes | 269 Views
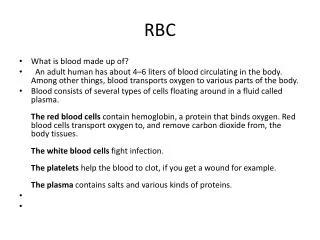
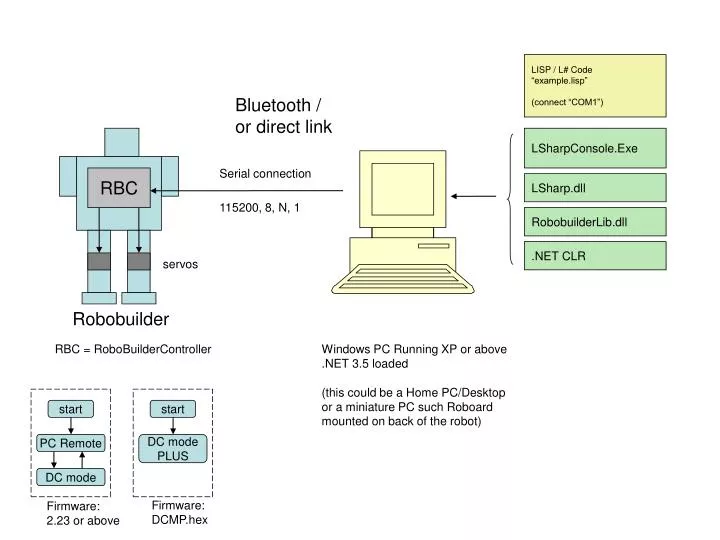
LISP / L# Code “example.lisp” (connect “COM1”). Bluetooth / or direct link. LSharpConsole.Exe. Serial connection. RBC. LSharp.dll. 115200, 8, N, 1. RobobuilderLib.dll. .NET CLR. servos. Robobuilder. RBC = RoboBuilderController. Windows PC Running XP or above .NET 3.5 loaded

E N D
LISP / L# Code “example.lisp” (connect “COM1”) Bluetooth / or direct link LSharpConsole.Exe Serial connection RBC LSharp.dll 115200, 8, N, 1 RobobuilderLib.dll .NET CLR servos Robobuilder RBC = RoboBuilderController Windows PC Running XP or above .NET 3.5 loaded (this could be a Home PC/Desktop or a miniature PC such Roboard mounted on back of the robot) start start PC Remote DC mode PLUS DC mode Firmware: DCMP.hex Firmware: 2.23 or above
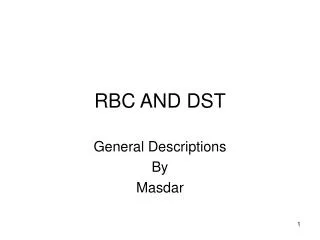
10 PRINT “Hello World” 20 END Bluetooth / or direct link Putty.exe Direct Serial connection RBC 115200, 8, N, 1 Jbasic.jar -CX Download servos 'Basic program PRINT “Hello World” END Windows PC Running XP or with optional Java VM (this could be a Home PC/Desktop or a miniature PC such Roboard mounted on back of the robot) Robobuilder RBC = RoboBuilderController Firmware: BASIC.hex
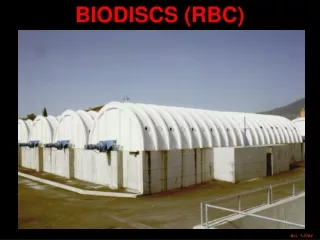
'Basic program PRINT “Hello World” END JBasic.jar Bluetooth / or direct link 10 PRINT “Hello World” 20 END Serial connection RBC 115200, 8, N, 1 Download Basic (Simple IDE with Compiler) servos Linux based PC (this could be a Home PC/Desktop or a miniature PC such Roboard mounted on back of the robot) Robobuilder RBC = RoboBuilderController Firmware: DCMP.hex