Download
1 / 23
230 likes | 362 Views
Qualitative Induction. Dor i an Šuc and Ivan Bratko Artificial Intelligence Laboratory Faculty of Computer and Information Science University of Ljubljana, Slovenia. Overview. Learning of qualitative models Our learning problem: qualitative trees and qualitatively constrained functions

E N D
Qualitative Induction DorianŠuc and Ivan Bratko Artificial Intelligence Laboratory Faculty of Computer and Information Science University of Ljubljana, Slovenia
Overview • Learning of qualitative models • Our learning problem: qualitative trees and qualitatively constrained functions • Learning of qualitatively constrained functions • Learning of qualitative trees (ep-QUIN, QUIN) • QUIN in skill reconstruction (container crane) • Conclusions and further work
Learning of qualitative models Motivation: • building a qualitative model is a time-consuming process that requires significant knowledge • Learning from examples of system’s behaviour: • GENMODEL-Coiera, 89; KARDIO-Mozetič, 87;Bratko et al., 89 • MISQ-Kraan et al., 91; Richards et al., 92 • ILP approaches-Bratko et al., 91; Džeroski&Todorovski, 93 Learning of QDE or logical models
Our approach • Inductive learning of qualitative trees from numerical examples; qualitatively constrained functions based on qualitative proportionality predicates (Forbus, 84) • Motivation for learning of qualitative trees: experiments with reconstruction of human control skill and qualitative control strategies(crane, acrobot-Šuc and Bratko 99, 00)
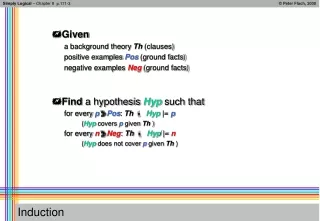
Learning problem • Usual classification learning problem, but learning of qualitative trees: • in leaves are qualitatively constrained functions (QCFs); QCFs give constraints on the class change in response to a change in attributes • internal nodes (splits) define a partition of the attribute space into areas with common qualitative behavior of the class variable
A qualitative tree example • A qualitative tree for the function:z=x2-y2 z is monotonically increasing in its dependence on x and monotonically decreasing in its dependence on y z is positively related to x and negatively related to y
Qualitatively constrained functions (QCFs) • M+(x) arbitrary monotonically increasing fn. of x • A QCF is a generalization of M+, similar to qual. proportionality predicates used in QPT(Forbus, 84) Gas in the container: Pres = c Temp / Vol , c = n R > 0 QCF: Pres = M+,-(Temp,Vol) Temp=std & Vol Pres Temp & Vol Pres Temp & Vol Pres Temp & Vol Pres ? Temp & Vol Pres ?
Learning QCFs Pres = 2 Temp / Vol Temp Vol Pres 315.00 56.00 11.25 315.00 62.00 10.16 330.00 50.00 13.20 300.00 50.00 12.00 300.00 55.00 10.90 • Learning of the “most consitent” QCF: • For each pair of examples form a qualitative change vector • Select the QCF with minimal error-cost
Learning QCFs QCF Incons. Amb. M+(Temp) M-(Temp) M+(Vol) M-(Vol) M+,+(Temp,Vol) M+,-(Temp,Vol) M-,+(Temp,Vol) M-,-(Temp,Vol) QCF Incons. Amb. M+(Temp) 3 1 M-(Temp) M+(Vol) M-(Vol) M+,+(Temp,Vol) M+,-(Temp,Vol) M-,+(Temp,Vol) M-,-(Temp,Vol) QCF Incons. Amb. M+(Temp) 3 1 M-(Temp) 2,4 1 M+(Vol) 1,2,3 / M-(Vol) 4 / M+,+(Temp,Vol) 1,3 2 M+,-(Temp,Vol) / 3,4 M-,+(Temp,Vol) 1,2 3,4 M-,-(Temp,Vol) 4 2 qTemp=neg qVol=neg qPres=pos Select QCF with minimal QCF error-cost
Learning qualitative tree • For every possible split, split the examples into two subsets, find the “most consistent” QCF for both subsets and select the split minimizing tree-error cost (based on MDL) • Algorithm ep-QUIN uses every pair of examples • An improvement: heuristic QUIN algorithm that considers also locality and consistency of qualitative change vectors
Algorithm ep-QUIN, example • 12 learning examples that correspond to 3 linear functions ep-QUIN does not consider the locality of qual. changes Induced qual. tree does not correspond to the intuition
Improvement: algorithm QUIN • Heuristic QUINalgorithm considers the locality and consistency of qualitative change vectors Human notices 3 groups of near-by points; QUIN considers the proximity of examples Qualitative change vectors of near-by points are weighted more
Improvement: algorithm QUIN • Heuristic QUINalgorithm considers the locality and consistency of qualitative change vectors Human notices 3 groups of near-by points; QUIN considers the proximity of examples QUIN considers the consistency of the class’s qual. change at knearest neighbors of the point QUIN: same algorithm as ep-QUIN but with the improved tree-error cost (weighted qualitative change vectors)
Experimental evaluation • On a set of artificial domains: • Results by QUIN better than ep-QUIN • QUIN can handle noisy data • In simple domains QUIN finds qualitative relations corresponding to our intuition • QUIN in skill reconstruction: • QUIN used to induce qual. control strategies from examples of the human control performance • Experiments in the crane domain
Skill reconstructionand behavioural cloning • Motivation: • understanding of the human skill • development of an automatic controller • ML approach to skill reconstruction: learn a control strategy from the logged data from skilled human operators (execution trace). Later called behavioural cloning (Michie, 93). • Used in domains as: • pole balancing (Miche et al., 90) • piloting (Sammut et al., 92; Camacho 95) • container cranes (Urbančič & Bratko, 94)
Learning problem for skill reconstruction • Execution traces used as examples for ML to induce: • a control strategy (comprehensible, symbolic) • automatic controller (criterion of success) • Operator’s execution trace: • a sequence of system states and corresponding operator’s actions, logged to a file at a certain frequency
Container crane Used in ports for load transportation Control forces: Fx, FLState: X, dX, , d, L, dL Based on previous work of Urbančič(94) Control task: transport the load from the start to the goal position
Learning problem, cont. Fx FL X dX d L dL 0 0 0.00 0.00 0.00 0.00 20.00 0.00 2500 0 0.00 0.00 -0.00 -0.01 20.00 0.00 6000 0 0.00 0.01 -0.01 -0.02 20.00 0.00 10000 0 0.02 0.10 -0.07 -0.27 20.00 0.00 14500 0 0.12 0.31 -0.32 -0.85 20.00 0.00 14500 0 0.35 0.59 -0.95 -1.49 20.00 0.01 ….… … … … … … ……. Usual approach: induce decision trees; COMPREHENSIBILITY
QUIN in skill reconstruction, crane domain • Qualitative trees induced from execution traces • Experiments with traces of 2 operators using different control styles • Crane control requires trolley and rope control • Rope control • QUIN: Ldes= f(X, dX, ,d, dL) • Often very simple strategy induced Ldes= M+(X ) bring down the load as the trolley moves from the start to the goal position
Trolley control • QUIN: dXdes= f(X, ,d) • More diversity in the induced strategies First the trolley velocity is increasing X < 20.7 yes From about middle distance from the goal (X=20.7) until the goal (X=60.1) the trolley velocity is decreasing no M+(X) X < 60.1 yes no At the goal reduce the swing of the rope (by acceleration of the trolley when the rope angle increases) M-(X) M+()
Trolley control • QUIN: dXdes= f(X, ,d) • More diversity in the induced strategies Enables reconstruction of individual differences in control styles X < 20.7 X < 29.3 yes no yes no M+(X) M+,+,-(X, , d) X < 60.1 d < -0.02 yes no yes no M-(X) M+() M-(X) M-,+(X,)
QUIN in skill reconstruction • Qualitative control strategies: • Comprehensible • Enable the reconstruction of individual differences in control styles of different operators • Define sets of quantitative strategies and can be used as spaces for controller optimization • QUIN is able to detect very subtle and important aspect of human control strategies
Further work • Qualitative simulation to generate possible explanations of a qualitative strategy • (Semi-)Qualitative reasoning to find the necessary conditions for the success of the qual. strategy • Reducing the space of admissible controllers by qualitative reasoning • QUIN is a general tool for qualitative system identification; applying QUIN in different domains