Download
1 / 22
220 likes | 387 Views
Mobile Object Detection through Client-Server based Vote Transfer. CVPR 2012 poster. Outline. Introduction Frame detection Mobile application blue-print Experiment Conclusion. Introduction. Android OS. Introduction. Short video sequence. Introduction. Main Contribution:

E N D
Mobile Object Detection through Client-Server based Vote Transfer CVPR 2012 poster
Outline Introduction Frame detection Mobile application blue-print Experiment Conclusion
Introduction Android OS
Introduction Short video sequence
Introduction • Main Contribution: • Novel hough forest based multi-frame object detection framework • Vote transfer • Client-server framework
Frame detection • Single-Frame detection • Hough forest [10] [10] J. Gall and V. Lempitsky. Class-specific hough forests for object detection. In CVPR, 2009.
Frame detection P={L,c,d}
Frame detection • Multi-Frame detection • Motivation • Different express with single frame detection
Frame detection • Multi-Frame detection • Vote transfer
Frame detection • Multi-Frame detection • Vote transfer
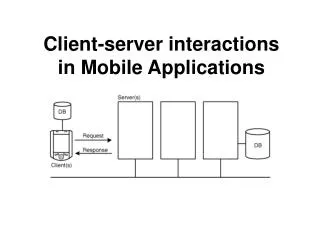
Mobile application blue-print Client-server
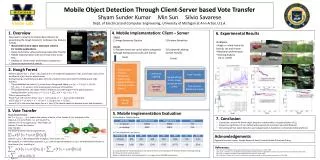
Experiment • Datasets • A new multi-view dataset that we collected • the Car Show Dataset introduced by Ozuysalet al [19] • http://www.eecs.umich .edu/vision/Mvproject.html [19] Pose estimation for category specific multiview object localization. In CVPR, 2009
Experiment • Vote transfer • Giving each a weight • Reference frame’s weight=1 • Other frames’s weight= 2 -i/10 , i={10,20,30,40,50}
Experiment Single vs Multi-frame Performance
Experiment Single vs Multi-frame Performance
Experiment Tracking analysis
Experiment Image resolution
Experiment • Mobile platform: Client-Server analysis • Client: • Motorola Atrix4g dual-core phone Android 2.2 • Image size:640*480 • Server: • 2.4GHZ triple-core desktop For more information to Motorola Atrix http://www.motorola.com/us/consumers/Motorola-ATRIX-4G/72112,en_US,pd.html?cgid=mobile-phones
Experiment • Mobile platform: Client-Server analysis • Single frame • Multi frame
Conclusion A new approach to multi-frame object detection using Hough Forest Realistic implementation Client-server approach on mobile platform About future work: Pose estimation, how view-point changes can foster pose estimation