Download
1 / 13
130 likes | 546 Views
KINEMATICS OF PARTICLES RELATIVE MOTION WITH RESPECT TO TRANSLATING AXES. In the previous articles, we have described particle motion using coordinates with respect to fixed reference axes. The displacements, velocities and accelerations so determined are termed “ absolute ”.

E N D
KINEMATICS OF PARTICLES RELATIVE MOTION WITH RESPECT TO TRANSLATING AXES
In the previous articles, we have described particle motion using coordinates with respect to fixed reference axes. The displacements, velocities and accelerations so determined are termed “absolute”.
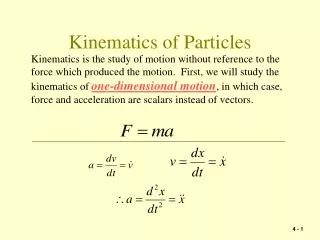
It is not always possible or convenientto use a fixed set of axes to describe or to measure motion. In addition, there are many engineering problems for which the analysis of motion is simplified by using measurements made with respect to a moving reference system. These measurements, when combined with the absolute motion of the moving coordinate system, enable us to determine the absolute motion in question. This approach is called the “ relative motion analysis”.
In this article, we will confine our attention to moving reference systems which translate but do not rotate.
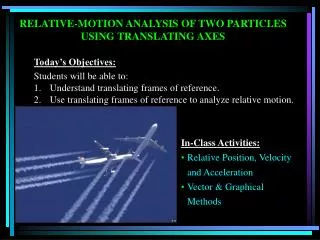
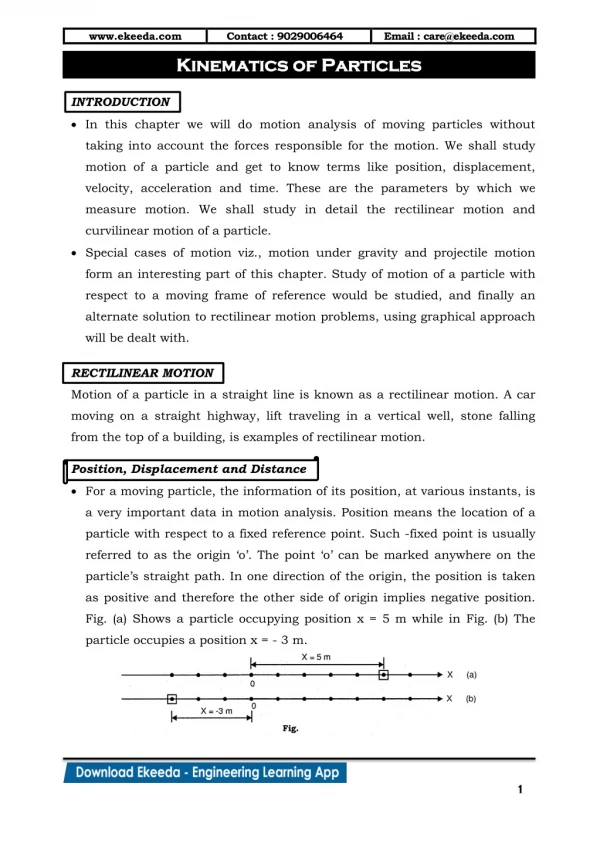
Now let’s consider two particles A and B which may have separate curvilinear motions in a given plane or in parallel planes; the positions of the particles at any time with respect to fixed OXY reference system are defined by and . Let’s attach the origin of a set of translating (nonrotating) axes to particle B and observe the motion of A from our moving position on B. Translating axis Fixed axis
The position vector of A as measured relative to the frame x-y is , where the subscript notation “A/B” means “A relative to B” or “A with respect to B”. Translating axes Fixed axes
The position of A is, therefore, determined by the vector Translating axes Fixed axes
We now differentiate this vector equation once with respect to time to obtain velocities and twice to obtain accelerations. Here, the velocity which we observe A to have from our position at B attached to the moving axes x-y is This term is the velocity of A with respect to B.
Acceleration is obtained as Here, the acceleration which we observe A to have from our nonrotating position on B is . This term is the acceleration of A with respect to B. We note that the unit vectors and have zero derivatives because their directions as well as their magnitudes remain unchanged. We can express the relative motion terms in whatever coordinate system is convenient – rectangular, normal and tangential or polar, and use their relevant expressions.
PROBLEMS 1. The car A has a forward speed of 18 km/h and is accelerating at 3 m/s2. Determine the velocity and acceleration of the car relative to observer B, who rides in a nonrotating chair on the Ferris wheel. The angular rate = 3 rev/min of the Ferris wheel is constant.
PROBLEMS 30o B 60 m r 30 m q A 4. Car A is travelingalong a circularcurve of 60 m radius at a constantspeed of 54 km/h. When A passesthepositionshown, car B is 30 m fromtheintersection, travelingwith a speed of 72 km/h andaccelerating at the rate of 1.5 m/s2. Determinethevelocityandaccelerationwhich A appearstohavewhenobservedby an occupant of B at thisinstant. Alsodeterminer, q, , , andforthisinstant.