Download
1 / 4
50 likes | 81 Views
Learn how to navigate vectors using angled directions, trigonometric properties, and inverse trigonometric functions. Discover the methods to measure angles, find reference angles, and calculate magnitudes accurately. Ideal for mastering bearings and navigation techniques in various applications.

E N D
Bearings and Navigation I. Using Angled Vectors (put calculator in degree mode). A) The vector must be in Component form (standard position) B) Remember your trig properties (hypotenuse = magnitude). 1) cos θ = the x distance / the magnitude. 2) sin θ = the y distance / the magnitude. 3) tan θ = the y distance / the x distance. C) If you know the magnitude and the angle, you can find the width (x distance) and the height (y distance) using sin & cos. D) If you know the width and the height, you can find the magnitude using the Pythagorean theorem. E) If you know any two lengths, you can find the angle using inverse trig (sin-1y/mag or cos-1x/mag or tan-1y/x).
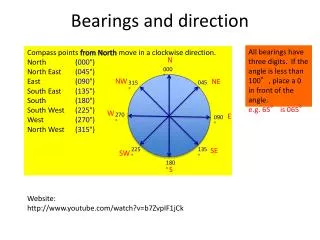
Bearings and Navigation II. Ways to Measure Angled Directions for Vectors. A) The vector must be in Component form (standard position) B) Bearings is the direction (in degrees) one object is from another object. 1) Bearings are used in surveying & navigation. 2) Bearings begin at due North or due South. C) Bearings are normally written in the form … compass direction degrees compass direction
Bearings and Navigation II. Ways to Measure Angled Directions for Vectors. D) For air navigation, angles start at due North and go clockwise (think … Unit Circle – but different starting place and direction of rotation). 1) The angles are measured in degrees. E) Unit Circle directions. Start at the + x-axis and go counter-clockwise. (90° = straight up, 180° = - x-axis, 270° is down).
Bearings and Navigation III. Finding the Reference Angle. A) Let θ be any angle in standard position. Its reference angle is the acute angle θ formed by the terminal side of θ and the horizontal axis (the x-axis). B) Finding the reference angle. [Quadrant I = no change] 1) Quadrant II = π – θ (rad) or 180° – θ (deg) 2) Quadrant III = θ – π (rad) or θ – 180° (deg) 3) Quadrant IV = 2π – θ (rad) or 360° – θ (deg)