Download
1 / 26
280 likes | 334 Views
Explore clock skew, jitter impact, existing methodologies, and problems in clock distribution architectures in the field of advanced CAD technologies like at Fujitsu Labs of America and UC Berkeley. Discover solutions for tree and grid-based architectures.

E N D
Clock Distribution Rajeev Murgai Advanced CAD Technologies Fujitsu Labs of America UC Berkeley Feb 15, 2005
FF FF FF FF +jitter -jitter Defining Clock Skew and Jitter • Clock skew • The deterministic (knowable) difference in clock arrival times at each flip-flop • Caused mainly by imperfect balancing of clock tree/mesh • Can be deliberately introduced using delay blocks in order to time-borrow • Accounted for in STA by calculating the clock arrival times at each flip-flop • Clock jitter • The random (unknowable, except distribution ) difference in clock arrival times at each flip-flop • Caused by on-die process, Vdd, temperature variation, PLL jitter, crosstalk, Static timing analysis (STA) accuracy, layout parameter extraction (LPE) accuracy • Accounted for in STA by subtracting (~3 ) from the cycle time in long path analysis, and adding to receiving clock arrival time in race analysis • Jitter is always bad, skew can be helpful or harmful. • Clock uncertainty skew jitter Long path analysis Race analysis Logic clk skew skew clk
Background • Technology scaling results in: • higher clock frequencies possible and requested by users • prominence of wiring parasitics (R,L,C) in electrical behavior • increasing noise impact on delays • increasing on-chip process variation impact on delays • Existing ASIC clock synthesis flows • Use tree architectures: not best for low skew, jitter, variations • Don't properly address noise issues • Rely on STA to calculate the delays through clock networks • Use inaccurate wiring models • Use noise-sensitive clock circuit topologies • Ignore or crudely estimate process/voltage/temperature variations • Don’t have tight integration of physical synthesis & clock synthesis • Result • Predictability of clock delay is poor: Clock uncertainty (i.e., skew + jitter) of 400ps is not uncommon • Maximum attainable clock frequency is impaired
FF FF FF FF FF PLL FF Problems with Existing Clock Methodologies • Tree-based Clock Distribution • Low power but... • Sensitive to mismatching branches, difficult to layout • Sensitive to noise, especially if wires are not shielded • Using STA to calculate tree timing results in large errors • => high skew and jitter small skew and jitter medium skew and jitter large skew and jitter
Problems with Static Timing Analysis (STA) What we have... L R Cs Cg signal wire What STA uses... Rup Rwire Cw/2 Cw/2 Cload Rdn Note: driver model is a little better than this with table look-up Other problems Cw can match either delay or slew, but not both interpolation using look-up tables
Clock Distribution Architectures • Two basic architectures • Tree • Grid (mesh) • Hybrids of tree and mesh • Tree + crosslinks • Mesh + local trees
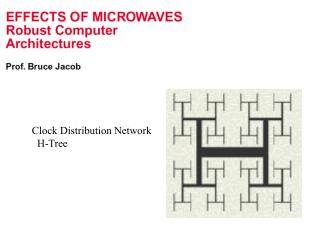
Tree • Widely used in ASICs • Advantages • Low cost • Wiring • Capacitance • Power • Clock gating easy • Disadvantages • Difficult to balance path delays due to asymmetric FF distribution • Sensitive to variations • Topologies • Symmetric H-tree • Asymmetric trees
CAD for Tree Architecture • Topology generation • H-tree: widely used • Method of means and medians (MMM) [Jackson et al. DAC 90] • Goal: reduce wirelength while minimizing skew. • Divide set S of points into Sleft and Sright, based on median. • | Sleft | = | Sright | • Connect/route center of mass (CM) of S to CM of Sleft and Sright. • Recurse on Sleft and Sright.
Method of Means & Medians • Problem • May not result in zero skew • Solution • One step look-ahead and decide direction of splitting. • Estimate skews using Penfield Rubenstein model. • Other problems • Buffer insertion not handled. • Obstructions not handled.
Topology: Recursive Geometric Matching • [Kahng et al. DAC 91] • Bottom-up pair-wise merge algorithm • Optimum geometric matching on n points (minimum wirelength) • Determine center point of each match edge • Recurse on n/2 points • Uses path length skews • Tries to balance root to leaf path lengths.
Topology: Simulated Annealing • Topology generation • Cheng et al: improve initial topology by simulated annealing • effective in reducing delay
CAD for Tree Architecture • Routing & wire sizing • Tsay, TCAD 93: zero-skew routing • first paper to use Elmore delay as delay model • earlier work used pathlength • DME, planar DME • make faster paths slower by detours/snaking to match delays • may use wire-sizing: make slower paths faster • Wire spacing • Buffering • Tellez & Sarrafzadeh, TCAD 97 • insert minimum buffers on a given topology to meet skew and slew constraints.
Grid/Mesh • n x n uniform mesh • Distributed array of k x k buffers drives the mesh. • Buffers driven by global H-tree. • Flip-flops directly connected to the nearest mesh segment • Used in modern processors • Advantages • Excellent for low skew • Robust to variations • Disadvantages • Higher wiring area, capacitance, power • Difficult to analyze • Loops and redundancy
Mesh • Sizing of clock distribution networks for high performance CPU chips • Desai et al., DEC [DAC 1996] • goal: size grid interconnect segments with constraints on clock latency and average current • assume: initial grid and interconnect sizes • width explicit => non-linear program; practical for small networks/trees. • consider width as implicit & solve using sequence of network problems. • Results: applied on clock networks of two actual processors: DC21046A and DC21164. Results for DC21046A: • 275MHz clock • grid has 1 million edges, 15.5K drivers, 81K receivers • 16% reduction in capacitance - without increasing clock latency. • Runtime: 3 days. • Optimal Wire and Transistor Sizing for Circuits with Non-tree Topology • Vandeberghe et al., Stanford University [ICCAD 97] • RC circuit with tree topology => sizing problem is convex optimization • meshes have R loops; use dominant time constant as measure of delay • solve using semi-definite programming (quasi-convex function)
source Hybrid Architecture: Tree + Cross-links • Reducing Clock Skew Variability via Cross Links • [Rajaram et. al., DAC 2004] • tree + short-circuit some sink pairs => non-tree topology • clock signal propagates through multiple paths; reduces skew and skew variability between shorted sinks • reduces skew variability by 30-70% • very small wire-length penalty (2%) over tree topology • Drawback: • does not consider buffering
source Hybrid Architecture: Mesh + Trees • Hybrid Structured Clock Network Construction [Hu & Sapatnekar, ICCAD 01] • Hybrid clock topology • simple top-level global mesh • zero-skew local trees at bottom • Presents wire sizing scheme to achieve latency and skew reduction. • iterative LP to minimize wire width (area) of top-level mesh, given delay bound • uses Elmore delay t = G-1C • sensitivity-based post-layout clock tree tuning to reduce skew. (Da, CDa) a c d b
Mesh -- excellent for low skew, jitter -- high power, area, capacitance -- difficult to analyze -- clock gating not easy -- used in modern processors Tree -- low cost (wiring, power, cap) -- higher skew, jitter than mesh -- widely used in ASIC designs -- clock gating easy to incorporate Best architecture depends on the application Hybrid: tree + cross-links -- low cost (wiring, power, cap) -- smaller skew, jitter than tree -- difficult to analyze Hybrid: mesh + local trees -- suitable for coarse mesh Clock Architectures
Processors • Traditionally two hierarchies • Global clock network • Local clock network • Skew control • Global network: balanced trees or grids • Local network: de-skewing buffers
source Pentium4 [IJSSC Nov 2001] • 0.18u, 6 metal layers, 42 million transistors • Core medium clock frequency: 2 GHz • Used by most core blocks • High speed scheduling and execution: 4GHz • Non critical blocks (e.g., bus interface logic): 1GHz • Global clock distribution • 3 spines; each spine has binary clock distribution • jitter reduction schemes • low-pass RC-filtered power supply for clock drivers • shield clock wires spines
IBM [IJSSC 2001] • Same clock architecture for 6 chips (including PowerPC): • Design priorities: min. clock skew, sharp rise and fall times (below 100 ps for 1ns clock), 50% duty cycle, low power consumption • Global buffered H-trees (on top 2 layers) drive sector buffers. • length-matched • Each sector buffer drives tuneable tree, which drives global mesh • Tree wire-widths tuned to minimize skew over long distances • Mesh minimizes local skew by connecting nearby points directly. • For each chip, 10-20 complete tuning cycles • Buffer placement, wiring • Flip-flops connected to closest point on mesh • Global clock skew of 22ps • Inductance included in analysis • Mesh difficult to analyze due to loops • cut the mesh
Alpha, DEC [JSSC, Nov 98] • 0.35u, 4 metal layers, 15.2 million transistors, 600 MHz at 2.2V • 3 hierarchies in clock distribution • Global, major (regional) and local • Multi-level mesh • global: trees to global GCLK grid • Uses 3% of M3/M4 interconnect • M3/M4 shielding; M2, M4: Vdd/Vss • power = 16W; skew = 72ps • Major (regional) • six grids over execution units • use 6% of M3, M4 • power = 14W • Local clock • tree structure, not shielded • conditional/unconditional clocks • less than 10ps skew; power = 15.6W • Clock simulation • AWE-reduction + SPICE s PLL GCLK grid
Clock structure Clock skew Capacitance/Layout area/power Floorplan flexibility H-tree Low/medium Low Low Grid Low High Medium/high Medium Medium Spine Summary of Processor Clock Design • Three basic routing structures for global clock • H-tree • low skew, smallest routing capacitance, low power • Floorplan flexibility is poor: • Grid or mesh • low skew, increases routing capacitance, worse power • Alpha uses global clock grid and regional clock grids • Spine • Small RC delay because of large spine width • Spine has to balance delays; difficult problem • Routing cap lower than grid but may be higher than H-tree. High
Estimation of Process-dependent Clock Skew in CMOS VLSI, Shoji [JSSC, Oct. 86] • Given two paths from clock source to FFs • Conventional design method • design paths such that skew between S1 and S2 is zero at a (fixed) process corner • However, • skew may not be zero at another process corner • Novel idea in the paper • design the two paths such that skew between S1 and S2 is zero for different process corners • TA + TB + TC = TD + TE (typical corner) • For high-current process corner H, • TA(H) = TA * 1/fN; TB(H) = TB * 1/fP (fN, fP > 1) • Zero-skew condition at H • TA(H) + TB(H) + TC(H) = TD(H) + TE(H) • (TA+TC) * 1/fN + TB/FP = TD/fN + TE/fP • (TE – TB)/fN = (TE - TB)/fP S1 S2 C E B D A CLK
Estimation of Process-dependent Clock Skew in CMOS VLSI, Shoji [JSSC, Oct. 86] • Either TE = TB or fN = fP. • But fN may not be same as fP (for PH-NL process) • In general, TE = TB => TD = TA + TC. • Pull-up and pull-down delays of two paths should be identical. • Determine NMOS & PMOS transistor widths of inverters to achieve this. • Results • 1.75 u process • Widths selected manually • Lead to very small skews at all process corners • Drawbacks • only analyzes two paths • assumes identical percentage delay variation for all NMOS (PMOS) devices • uses simplistic delay model; ignores wire cap S1 S2 C E B D A CLK
j i Logic FF FF aj ai skew clk Optimal Clock Skew Scheduling • Long & short path constraints impose lower/upper bounds on skew. • long path analysis: aj ai + logic_max + tset_up - Tcycle • short path analysis: aj ai + logic_min - thold • Leads to a set of linear inequalities: ai – aj cij • Given a clock cycle, feasibility can be solved using linear program, more efficiently with Bellman-Ford shortest path [Fishburn TCAD90]. • If wish to compute optimum clock cycle, • Perform binary search using above feasibility check. • Perform parametrized shortest path [Tarjan et al.] • One challenge: realize each ai • Other objectives: minimize power or switching noise.
j i Logic FF FF aj ai skew clk Optimal Clock Skew Scheduling Tolerant to Process Variations [Neves & Friedman, 96] • Long path and short path constraints impose lower and upper bounds on skew. • long path analysis: aj ai + logic_max + tset_up - Tcycle • short path analysis: aj ai + logic_min - thold • Try to choose skews in the middle of the bounds for maximum protection against process variations.