Download
1 / 29
310 likes | 557 Views
Learning Roomba. Module 2 - Robot Configurations. Outline. What is a Robot Configuration? Why is it important? Several types of Configurations Roomba Configuration. What is a Robot Configuration?. Describes how a robot can move and where it can go Includes Physical shape of the Robot

E N D
Learning Roomba Module 2 - Robot Configurations
Outline • What is a Robot Configuration? • Why is it important? • Several types of Configurations • Roomba Configuration
What is a Robot Configuration? • Describes how a robot can move and where it can go • Includes • Physical shape of the Robot • Model of how the Robot can move in the Environment
What is a Robot Configuration? • Holonomic vs. Non-holonomic • Holonomic Robots can move in any direction • Non-holonomic Robot is contrained to certain types of movement • Example: A Car is non-holonomic
What is a Robot Configuration? • For ground robots, the Configuration often describes how it • Rotates (How the robot turns) • Translates (How the robot moves forward or backward)
Why is it important? • With the Configuration you can tell how a Robot will operate prior to controlling it • Important to understand a Robot’s limitations while designing it
Several Types of Configurations • Wheeled Robots • Differential Drive • Ackerman Steer • Tricycle Drive • Synchro Drive • Skid Steer • Roller Wheeled • Legged Robots • Flying Robots • Fixed-wing • Rotorcraft
Differential Drive • 2 Wheels • Independently powered • in-line with each other • Usually in the center of the robot • Often has 1 or 2 casters • Non-powered • Swivel in any direction • Add stability
Differential Drive • Advantage • Simple Design • Can go anywhere the robot can fit • Disadvantage • Has difficulty with uneven terrain (both wheels need to touch the ground to work) • Has to rotate before traveling in a new direction
Differential Drive • Shape matters • In this example, the Circle robot can turn freely while the Square robot cannot
Ackerman Steer • Like a Car • 4 Wheels • 2 Rear wheel are powered, fixed-rotation • 2 Front wheels are non-powered that turn • Turn at different Angles
Ackerman Steer • Advantage • Drive and Rotation functionality are separated • Typically more stable • Disadvantage • Mechanically complicated • Often complicated maneuvers (non-holonomic)
Tricycle Drive • Similar to Ackerman Steer • Only 1 front wheel that turns
Tricycle Drive • Advantage • Mechanically Simpler • Disadvantage • Similar motion limitations as Ackerman Steer • Less Stable
Synchro Drive • At least 3 wheels • All rotate together • All are powered together
Synchro Drive • Advantage • Can travel in any direction without turning the top base • Separate motors for turning and driving • Disadvantage • Very Mechanically Complicated • Top base cannot face another direction
Skid Steer • Like a tank • Several wheels on each side or tank treads • Turning Requires skidding
Skid Steer • Advantage • Can handle uneven terrain well • Disadvantage • Poor odometry due to skidding
Roller Wheeled • 3 Wheels • Arranged around the circumference of the robot • Wheels are Roller Wheels (Next Slide) • Non-Steering • Independently Powered
Roller Wheeled • Roller Wheels • Includes Rollers • Perpendicular to the Wheel • Around the wheel • Non-powered
Roller Wheeled • Advantage • Can go in any direction without first rotating • Can go anywhere the robot can physically fit • Disadvantage • Tracking position through odometry is difficult
Legged Robots • Uses legs instead of wheels • Any number of legs
Legged Robots • Advantage • Can travel over rugged terrain • Disadvantage • Mechanically complicated • Hard to control
Fixed Wing Aerial • Like a Plane • Not Restricted to the ground
Rotorcraft Aerial • Like a Helicopter • Not Restricted to the ground • Can take-off vertically
Other Configurations • Many other Configurations • Robots are not restricted to Ground (or even Air) • Can be manipulated in many different ways
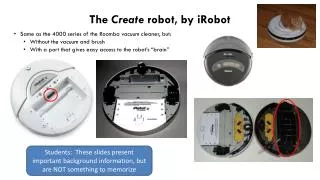
Roomba Configuration • Wheels • 2 Wheels • Independently Powered • Non-Steered • Arranged at approximately the center of the robot on opposite sides of each other • Shape • Circular • Few inches tall
Roomba Configuration • Round Differential-Drive Configuration • Can travel anywhere the Roomba can fit and get to • Can move in any direction, but first need to turn to that direction