Download
1 / 10
120 likes | 246 Views
AC/DC, Stepper Motors and Gearing. CSC 338 – Robotics and Intelligent Agents Theodore Trotz . Magnetism Electricity. The link between magnetism and electricity was first discovered during an experiment

E N D
AC/DC, Stepper Motors and Gearing CSC 338 – Robotics and Intelligent Agents Theodore Trotz
Magnetism Electricity • The link between magnetism and electricity was first discovered during an experiment • Hans Christian Ørsted discovered that a compass needle deflected from true north when electric current flowing through a wire was switched on and off • Expanded on by Albert Einstein in 1905 with his theory of Special Relativity • Connects Electricity and Magnetism
War of Currents • Alternating Current – Direction between load and generator reverses cyclically • Promoted in late 1800s by Nikola Tesla and George Westinghouse • Direct Current – Direction between load and generator is constant in direction • Promoted by Thomas Edison • AC eventually won as the better way to distribute power. • AC cables could transmit much further than DC • AC cables were smaller as well
Generators and Motors • All contemporary Power Plants work essentially the same way • Mechanical energy is converted into electrical energy • A coil of wire is spun inside a magnetic field exciting the electrons • The reverse conversion is done by an electric motor
AC Motors • Two Main Types of AC Motors • Synchronous – Rotates at exactly the supply frequency or submultiples of that frequency • Induction – Rotates slightly slower than the supply frequency
Synchronous Motors • Power Plants use synchronous generators • It’s important to keep the supply frequency constant • Used where high precision is required • Seen in Stepper Motors • Clocks also employ synchronous motors
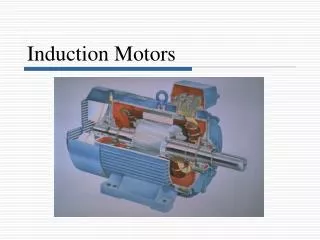
Induction Motors • Induction motors use a time varying magnetic field to move the rotor • The rotor is carried around the magnetic field, but at a slightly slower rate • Induction motors are also known as asynchronous motors • The difference between the rotors output and the magnetic field is called slip which increases with load • Induction motors often use a squirrel cage design • http://www.youtube.com/watch?v=PYesQZ20Kwc
DC Motors • Two Main Types of DC Motors • Brushed • Brushless • Brushed Motors have two brushes which physically contact rotors split ring • This ring supplies the charge onto the rotors coil, which is typically suspended between permanent magnets • Brushless Motors require a motor controller to convert DC to AC • The design is essentially the opposite of a brushed motor; permanent magnet on the inside and a varying electromagnetic field stator.
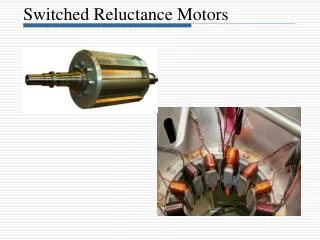
Stepper Motors • A brushless, synchronous motor that can divide a full rotation into a large number of steps • Require motor controller or drive circuits • Consist of multiple toothed electromagnets around a central gear-shaped piece of iron • Can be viewed as a synchronous AC motor with the number of stators increased
Gear Ratios • It may be necessary to increase or reduce the speed at which the output shaft turns. For that we need to understand gear ratios • This is easy if we understand the circumference of a circle C = 2 * pi * R • If two gears are meshed together, one with twice the circumference, it will yield a 2:1 ratio • Teeth are put on gears for precision and to prevent slippage • To determine the ratio, count the number of teeth on each gear and divide • Consider one gear with 60 teeth and another with 20. 60/20 = 3 which produces a 3:1 ratio