Download
1 / 20
200 likes | 266 Views
A Robot that Walks; Emergent Behaviors from a Carefully Evolved Network Rodney A. Brooks. INTRODUCTION. It is built integrating relatively large number of sensor inputs and large number of actuator outputs.

E N D
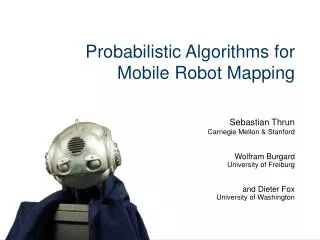
A Robot that Walks; Emergent Behaviors from a Carefully Evolved Network Rodney A. Brooks
INTRODUCTION • It is built integrating relatively large number of sensor inputs and large number of actuator outputs. • It consists of a series of networks each one being the strict augmentation of the previous one.
ENVIRONMENT • It is carried out in a dynamic real world environment
SENSORS • Twelve force sensors • Six pyro -electric sensors • Two inclinometers one for pitch and the other for roll measurement • Two whiskers in the front.
EFFECTORS • It consists of motors located in legs of the robot which are effected by these sensors.
MOTIVATIONS • Its main aim is to walk and follow a person passively. • It is mainly used as a test bed for Brook’s subsumption architecture.
SUBSUMPTION ARCHITECTURE • It provides a incremental method for building robot control systems linking perception to action. • It is implemented by means of augmented finite state machines. • The network is augmented in a incremental way to improve the performance.
AUGMENTED FINITE STATE MACHINE • Simple behaviors performed by AFSM are hierarchically organized so that more complex behaviors emerge. • Inhibition and Suppression between behavior modules produce provides distributed control. • This system results in pre-wired patterns of behaviors.
NETWORK AND EMERGENT BEHAVIORS • There are two motors in each leg. alpha-motor (for advance) which swings leg back and forth beta-motor (for balance) which swings the leg up and down
PROWLING • The pyro-electric infrared sensors sends an activity message to the prowl machine when it detects motion. • The prowl machine inhibits the leg-lifting trigger message from the walk machine.
STEERED PROWLING • It takes note of the predominant direction from the infrared activity. • It writes in a register in each alpha pos of leg and stops back swinging motion of leg. • This forces the robot to turn in the direction of motion.
LEARNING TO CO-ORDINATE BEHAVIORS • Develop an algorithm for learning the control of behaviors through experience. • The algorithm must be completely distributed. • Each behavior tries to learn when it should become active.
THE LEARNING TASK • It incrementally change the precondition list of behaviors. • The behaviors which become active should satisfy follow two constraints • Behaviors are relevant. • Behaviors are reliable.
Cont.. • Similarly the same formula is applied to find out corr(N,A). • The relevance of a particular behavior is defined as Corr(P,A) – Corr(N,A). The more relevant behavior has more chances of becoming active.
Reliability • The reliability of a behavior is defined as
Cont.. • The reliability of a behavior is used to decide whether the behavior should try to improve itself. • If behavior is not reliable then a new perceptual condition is picked and checked. • All this process takes place in cyclic manner.