Download
1 / 1
10 likes | 135 Views
Characterization of ATMS Bias Using GPSRO Observations. Lin Lin 1,2 , Fuzhong Weng 2 and Xiaolei Zou 3 1 Earth Resources Technology, Inc. ( Lin.Lin@noaa.gov ) 2 NOAA/NESDIS/Center for Satellite Applications and Research

E N D
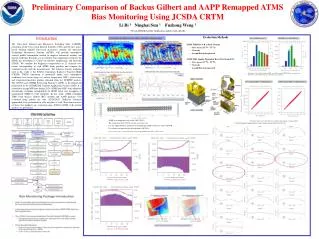
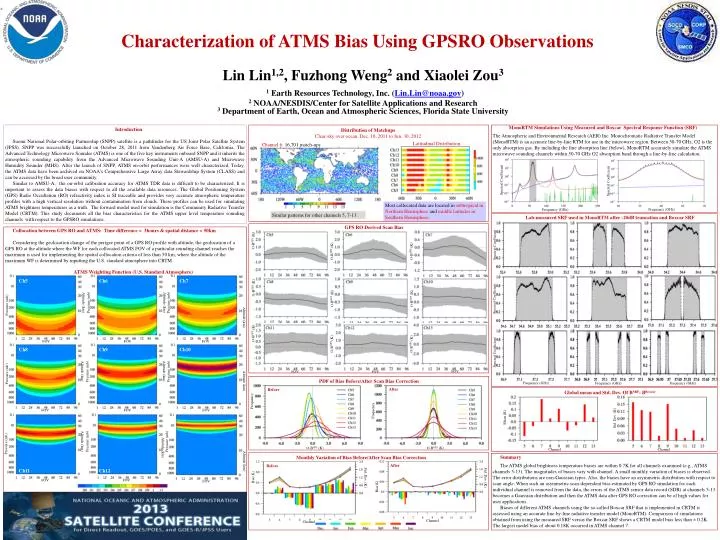
Characterization of ATMS Bias Using GPSRO Observations Lin Lin1,2, Fuzhong Weng2 and Xiaolei Zou3 1 Earth Resources Technology, Inc. (Lin.Lin@noaa.gov) • 2 NOAA/NESDIS/Center for Satellite Applications and Research 3 Department of Earth, Ocean and Atmospheric Sciences, Florida State University MonoRTM Simulations Using Measured and Boxcar Spectral Response Function (SRF) The Atmospheric and Environmental Research (AER) Inc. Monochromatic Radiative Transfer Model (MonoRTM) is an accurate line-by-line RTM for use in the microwave region. Between 50-70 GHz, O2 is the only absorption gas. By including the fine absorption line (below), MonoRTM accurately simulate the ATMS microwave sounding channels within 50-70 GHz O2 absorption band through a line-by-line calculation. Introduction Suomi National Polar-orbiting Partnership (SNPP) satellite is a pathfinder for the US Joint Polar Satellite System (JPSS). SNPP was successfully launched on October 28, 2011 from Vandenberg Air Force Base, California. The Advanced Technology Microwave Sounder (ATMS) is one of the five key instruments onboard SNPP and it inherits the atmospheric sounding capability from the Advanced Microwave Sounding Unit-A (AMSU-A) and Microwave Humidity Sounder (MHS). After the launch of SNPP, ATMS on-orbit performances were well characterized. Today, the ATMS data have been archived on NOAA’s Comprehensive Large Array data Stewardship System (CLASS) and can be accessed by the broad user community. Similar to AMSU-A, the on-orbit calibration accuracy for ATMS TDR data is difficult to be characterized. It is important to assess the data biases with respect to all the available data resources. The Global Positioning System (GPS) Radio Occultation (RO) refractivity index is SI traceable and provides very accurate atmospheric temperature profiles with ahigh vertical resolution without contamination from clouds. These profiles can be used for simulating ATMS brightness temperatures as a truth. The forward model used for simulation is the Community Radiative Transfer Model (CRTM). This study documents all the bias characteristics for the ATMS upper level temperature sounding channels with respect to the GPSRO simulations. Spectral Coefficient Spectral Coefficient Frequency (GHz) Frequency (GHz) Lab-measured SRF used in MonoRTM after -20dB truncation and Boxcar SRF GPS RO Derived Scan Bias Collocation between GPS RO and ATMS: Time difference < 3hours & spatial distance < 50km • Considering the geolocation change of the perigee point of a GPS RO profile with altitude, the geolocation of a GPS RO at the altitude where the WF for each collocated ATMS FOV of a particular sounding channel reaches the maximum is used for implementing the spatial collocation criteria of less than 50 km, where the altitude of the maximum WF is determined by inputting the U.S. standard atmosphere into CRTM. O-BGPS(K) Spectral Coefficient O-BGPS(K) O-BGPS(K) ATMS Weighting Function (U.S. Standard Atmosphere) Distribution of Matchups Clear-sky over ocean, Dec. 10, 2011 to Jun. 30, 2012 Ch5 Ch6 Ch7 O-BGPS(K) Latitudinal Distribution Channel 6: 16,701 match-ups Pressure (mb) Pressure (mb) O-BGPS(K) O-BGPS(K) Pressure (mb) Spectral Coefficient Altitude (km) Altitude (km) Altitude (km) O-BGPS(K) O-BGPS(K) O-BGPS(K) FOV FOV FOV Most collocated data are located in subtropical in Northern Hemisphere and middle latitudes in Southern Hemisphere. Ch8 Ch9 Ch10 Spectral Coefficient Similar patterns for other channels 5, 7-13. Pressure (mb) Pressure (mb) Pressure (mb) FOV FOV FOV Altitude (km) Altitude (km) PDF of Bias Before/After Scan Bias Correction Frequency (GHz) Frequency (GHz) Frequency (GHz) Altitude (km) After Before Global mean and Std. Dev. Of BSRF- BBoxcar Frequency Frequency Mean (K) FOV FOV FOV Std. Dev. (K) Pressure (mb) Pressure (mb) Pressure (mb) Altitude (km) O-BGPS (K) O-BGPS (K) Channel Channel Altitude (km) Summary The ATMS global brightness temperature biases are within 0.7K for all channels examined (e.g., ATMS channels 5-13). The magnitudes of biases vary with channel. A small monthly variation of biases is observed. The error distributions are non-Gaussian types. Also, the biases have an asymmetric distribution with respect to scan angle. When such an asymmetric scan-dependent bias estimated by GPS RO simulation for each individual channel is removed from the data, the errors of the ATMS sensor data record (SDR) at channels 5-13 becomes a Gaussian distribution and then the ATMS data after GPS RO correction can be of high values for user applications. Biases of different ATMS channels using the so-called Boxcar SRF that is implemented in CRTM is assessed using an accurate line-by-line radiative transfer model (MonoRTM). Comparison of simulations obtained from using the measured SRF versus the Boxcar SRF shows a CRTM model bias less than ± 0.2K. The largest model bias of about 0.18K occurred in ATMS channel 7. Monthly Variation of Bias Before/After Scan Bias Correction Altitude (km) After Before Ch11 Ch12 Bias K) Ch13 FOV FOV Std. Dev. (K) Std. Dev. (K) FOV Bias K) Channel Channel