Download
1 / 22
220 likes | 232 Views
This paper presents a method for automatic cylinder detection using the Hough Transform. The method approximates objects in industrial scenes using planes, spheres, cones, and cylinders. It discusses the space and time complexity of the approach and provides examples of its application. The paper also proposes a two-step approach for orientation estimation and position and radius estimation of cylinders. It explores different sampling techniques and presents results on NAM modeling. Future plans include refining the results and detecting and fitting curves.

E N D
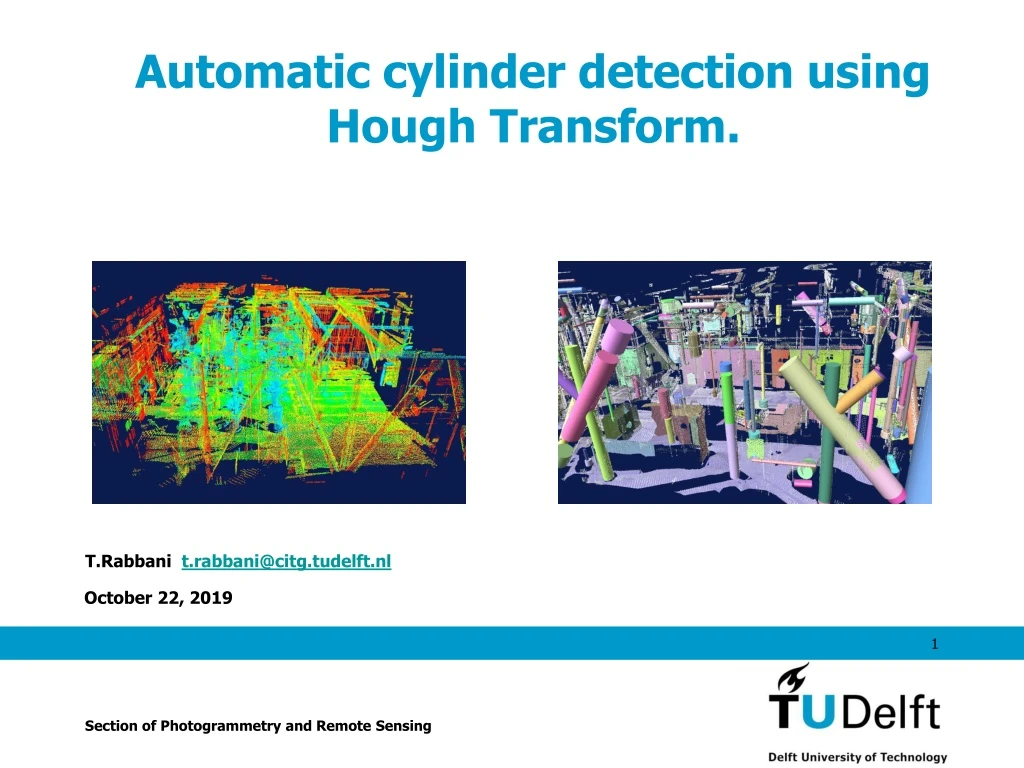
Automatic cylinder detection using Hough Transform. T.Rabbani t.rabbani@citg.tudelft.nl Section of Photogrammetry and Remote Sensing
Hough Transform for automatic cylinder detection • 85% of objects found in industrial scenes can be approximated by planes, spheres, cones and cylinders • 5-free parameters for cylinder.
Hough Transform for automatic cylinder detection • Space Complexity • Time complexity • Example: • S=100 Cs = 9.3 GB • S=200 Cs = 300 GB • Solution: Two-step approach • Orientation Estimation • Position and Radius estimation
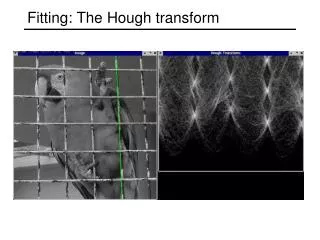
Basic Idea Behaviour of normals on Gaussian sphere
Uniform Sampling of orientation space • Uniform sampling essential for Hough transform • Place points so that each point represents equal area on sphere surface • No closed form solution • Iterative solution too slow, as Hough transform needs bi-directional mapping
Spherical sampling • linear sampling of and • Highly nonlinear
Cartesian sampling • Use implicit equation of sphere • Uniformaly sample x and y
Approximate Uniform Sampling Number of samples in phi = For mapping back and forth:
Results on NAM modeling • 20 million points • Processing: • Segmentation • Automatic cylinder and plane detection • Planar patches: 946 • Cylinders: 1392
Problem: Model Selection • Domains of planes and cylinders overlap • A cylinder can be represented by a number of planar patches • A plane by a set of cylindrical segments (a) (b)
Solution: Hypothesis verification • Hough transform will always give a hit • Consider each hit as a strong hypothesis • Employ model matching for hypothesis verification • Accept only if hypothesis verification is successful
Planarity Test • Histogram of • Distances • Angles with normal • Aspect ratio = Max Extent/Min Extent Max-extent Min-extent
Cylindricality Test • Difference between predicted and actual normal • Distribution of points on cylinder surface • Max min radius theta
Future Plans • Results refinements • Merging of multiple hits • Connection of separated segments due to occlusions etc • Automatic constraint detection • Detection and fitting of curves