Download
1 / 27
360 likes | 772 Views
SIDESCAN SONAR!. Some terminology. Footprint: Seafloor area sampled by a single acoustic signal pulse. Fish: An instrument towed behind a ship -- e.g. sidescan sonar and its casing. Hull: The main body or structure of a ship. Sidescan sonar. Multibeam bathymetry. Hull-mounted vs towed.

E N D
Some terminology Footprint: Seafloor area sampled by a single acoustic signal pulse. Fish: An instrument towed behind a ship -- e.g. sidescan sonar and its casing. Hull: The main body or structure of a ship.
Sidescan sonar Multibeam bathymetry
Hull-mounted vs towed • Hull-mounted (i.e., most swath bathymetry systems): • Are continually mounted on the ship; don’t require repeated deployment • Can collect data while ship is being used for other purposes (e.g., physical oceanographic cruise) • Fast surveying (ship can travel at ~10 knots) • Acoustically noisy (near-surface turbulence and ship noise) • Resolution constrained by near-sea-surface location (i.e., can’t go lower to get more detailed picture of seafloor) • Hard to access for repairs • Can only be used with certain hull shapes
Hull-mounted vs towed • Towed (i.e., most sidescan sonar systems): • Easier to move from ship to ship • Operate in quieter water at greater depth • Must be deployed each cruise • At deployment, ship speed must be near zero • Location of fish with respect to ship must be measured or calculated
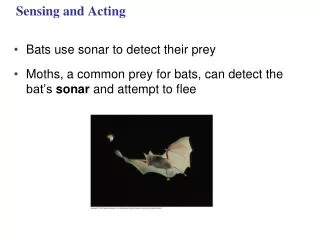
Basic physics: Sidescan sonar • A set of transducers on the instrument transmits acoustic energy through the water column • Energy encounters seafloor • Energy can be: • Reflected • Refracted (Snell’s Law) through substrate • Scattered/reradiated from seafloor features
Basic physics: Sidescan sonar • Sidescan instrument collects the backscattered energy returning from the seafloor. • Produce images of the topography or roughness of the sea floor based on the strength of the energy backscattered off of the seafloor. • Images kind of look like aerial photographs, but are produced using sonar rather than light. “Illuminated features.” • “Reflectivity” is often used in place of “backscatter” (although strictly speaking, reflected energy is different from backscattered energy).
Instrument design/data collection • Two outgoing sonar signals, one to either side of the instument. Beams expand with distance from the instrument. • Directly beneath instrument = “nadir” = no signal. • Slightly different frequencies on each side (11 kHz for port and 12 kHz for starboard) to decrease interference between return signals on each side. • Strength of returned signal is assigned value 0 to 255 (0 = black and 255 = white). Translated into pixels.
Image interpretation • Strong returned energy (hard bottom, no sediments) = dark on a light background. “Like shining a black flashlight on the seafloor.” (GLORIA and TOBI are opposite.) • Picture of roughness of the seafloor. Sedimented abyssal plains = low roughness. Faults, fissures, slopes, new volcanic features = high roughness/”high reflectivity.” • Lots of geometric (angle) corrections. Requires computer processing. Fish depth, bathymetry, look angle, speed of survey, frequency, repetition of pings, acoustic noise, track curvature. • Data duplication/deletion at turns.
Image interpretation • Features perpendicular to shiptrack are deemphasized (“underensonified”), while features parallel to shiptrack are overemphasized (“overensonified”). • “Simulated sun at a low grazing angle.” Shadows (sonic, not light).
GLORIA GLORIA = Geological Long-Range Inclined ASDIC ASDIC = Anti-Submarine Detection and Investigation Committee Southampton Oceanography Centre and USGS Towed 200 m behind the ship. Tow depth: 30-60 m Depth range: up to 11 km Emits a pulse every 30 seconds. Survey speed: 12 knots
DSL-120 (DSL = Deep Submergence Laboratory (WHOI))
SeaMarc II No current photo available
Puna Ridge Kilauea first began erupting in 1983. Lateral protrusions of magma (dikes) = rift zones Southwest Rift Zone. East Rift Zone: 55 km from summit to shore, then another 75 km underwater. Pu’u O’o: site of current Kilauea eruption (20 km from summit) Puna Ridge = submarine portion of East Rift Zone R/V Thompson (U.W.) and DSL-120. Explore submarine magma transport processes.
Finding shipwrecks s/s Paula Faulbaum Oct. 18, 1941, headed just south of Stockholm, Sweden Raining, wind blowing at 18-20 m/s Hit aground, took on water. Crew abandoned ship. Next morning, ship had sunk. Bow is 40 m deep, stern is 70 m deep.
Finding shipwrecks s/s Nedjan. Built in Scotland in 1893. 64 m long. January 1954: Departed Sweden. Overnight, steering malfunctioned and she started to drift. Lost off the coast. No survivors (crew of 17). Found in 1996 at 32 m depth using sidescan.