Download
1 / 8
80 likes | 183 Views
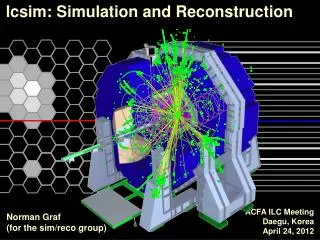
Iterative Tracking in LCSim. July 20 , 2010. Christian Grefe CERN, Bonn University. Motivation. Currently tracking in LCSim is steered by a list of strategies Each strategy defines the roles of each layer 3 seed layers + 1 confirm layers + several extension layers (usually all other)

E N D
Iterative Tracking in LCSim July 20, 2010 Christian Grefe CERN, Bonn University
Motivation • Currently tracking in LCSim is steered by a list of strategies • Each strategy defines the roles of each layer • 3 seed layers + 1 confirm layers + several extension layers (usually all other) • χ2 cut for the helix fit • A strategy list should cover the minimum number of layer combinations needed to find all tracks (above certain pt and minimum nHitsreq) • This is automatically done using a training sample • Weighting layers is possible to favor certain strategies (i.e. inside-out) • All Strategies are equal • All are tried and a list of candidates is formed • If candidates share hits the “best” is chosen (based on χ2 of fit)
Motivation (cont.) • Iteration allows another level of steering • Each strategy list is used to form tracks and all used hits are removed • Following strategy lists suffer from less confusion • Possible scenario to increase performance • Start with well defined tracks (many hits, moderate χ2-cut) • Find low pt tracks (less hits, tighter χ2-cut)
Status • Implemented IterativeSeedTracker as derived class from SeedTracker • Small changes to HitManager (does not break SeedTracker) • No other changes needed • Compatible with existing SeedTrackerDiagnostics drivers • First tests done
XML Steering Example • Usage almost identical to SeedTracker <lcsimxmlns:lcsim="http://www.lcsim.org/schemas/lcsim/1.0" xmlns:xs="http://www.w3.org/2001/XMLSchema-instance" xs:noNamespaceSchemaLocation="http://www.lcsim.org/schemas/lcsim/1.0/lcsim.xsd"> <inputFiles> <file>/afs/cern.ch/eng/clic/work/events/clic01_sid/uds91_09_.slcio</file> </inputFiles> <control> <numberOfEvents>-1</numberOfEvents> <verbose>false</verbose> <printDriverStatistics>true</printDriverStatistics> <printDriversDetailed>true</printDriversDetailed> </control> <execute> <driver name="hitMaker" /> <driver name="iterativeSeedTracker" /> </execute> <driver name="hitMaker" type="org.lcsim.recon.tracking.seedtracker.steeringwrappers.SiD02HybridHitMakerNoCCD" > </driver> <driver name="iterativeSeedTracker" type="org.lcsim.recon.tracking.seedtracker.IterativeSeedTracker" > <inputCollection type="String">HelicalTrackHits</inputCollection> <trkCollectionName type=“String”>Tracks</trkCollectionName> <strategyFile type="String">StrategyList1.xml</strategyFile> <strategyFile type="String">StrategyList2.xml</strategyFile> <timingPlots type="boolean">true</timingPlots> </driver> </drivers> </lcsim> digitization driver Use as many as you want, order is important!
First Tests • 1000 uds @ 3 TeV, first use 7Hit strategies and 6Hit strategies later • The 6 hit strategy picks up some extra tracks
First Tests (cont.) • No notable impact on track reconstruction time
Outlook • Extend StrategyBuilder to allow for “iterative training” • Give several prototype strategies with individual definition of findability (nHits, pT, d0, z0, χ2-cut) • Train strategy lists successively • Remove tracks that are findable by this strategy list before training the next • (This is only iterative training on different phase spaces, can not simulate gain by removing confusion because it is on MC level) • Extensive testing! • Impact on tracking efficiency / purity