Download
1 / 3
30 likes | 111 Views
Buoyancy Controlled Pollution Tracking Vehicle. Goal: Track Combined Sewage Overflow (CSO) plumes of pollution dumped into Lake Michigan from Milwaukee’s sewer system. Combined Sewage Overflow Plume from Milwaukee Harbor.

E N D
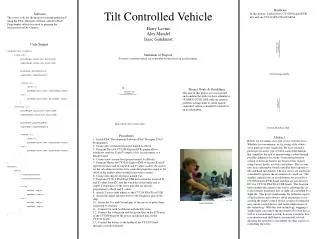
Buoyancy Controlled Pollution Tracking Vehicle Goal: Track Combined Sewage Overflow (CSO) plumes of pollution dumped into Lake Michigan from Milwaukee’s sewer system. Combined Sewage Overflow Plume from Milwaukee Harbor Project: Create a vehicle with the ability to track these plumes via external drag force, sensors, and control over its buoyancy. A Collaboration between the UWM’s School of Freshwater Sciences and Metro Milwaukee Sewer District
What’s the Plan? • Use Archimedes’ Principle to control buoyancyDrag Force for lateral mobilityDepth From Pressure Readingsg • Proof of Concept • Prototyping
What’s Left to be Done? • Final Vehicle -Significantly Smaller -Pistons -PID Control loops • Additional Sensors-Finding sensors that will best detect CSO Plumes. • Combining the two fora field model to be deployed in Lake Michigan.