Download
1 / 46
480 likes | 739 Views
Chapter 10 Rotational motion and Energy. Rotational Motion. Up until now we have been looking at the kinematics and dynamics of translational motion – that is, motion without rotation. Now we will widen our view of the natural world to include objects that both rotate and translate.

E N D
Chapter 10 Rotational motion and Energy
Rotational Motion • Up until now we have been looking at the kinematics and dynamics of translational motion – that is, motion without rotation. Now we will widen our view of the natural world to include objects that both rotate and translate. • We will develop descriptions (equations) that describe rotational motion • Now we can look at motion of bicycle wheels and even more!
Rotational variables • - Angular position, displacement, velocity, acceleration II. Rotation with constant angular acceleration III. Relation between linear and angular variables - Position, speed, acceleration IV. Kinetic energy of rotation V. Rotational inertia VI. Torque VII. Newton’s second law for rotation VIII. Work and rotational kinetic energy
Rotational kinematics • In the kinematics of rotation we encounter new kinematic quantities • Angular displacement q • Angular speed w • Angular acceleration a • Rotational Inertia I • Torque t • All these quantities are defined relative to an axis of rotation
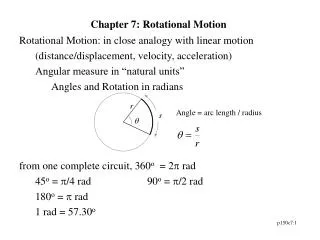
Angular displacement • Measured in radians or degrees • There is no dimension Dq = qf – qi CW qi Dq Axis of rotation qf
Note:we do not reset θ to zero with each complete rotation of the reference line about the rotation axis. 2 turns θ=4π Translation:body’s movement described by x(t). Rotation:body’s movement given by θ(t) = angular position of the body’s reference line as function of time. Angular displacement:body’s rotation about its axis changing the angular position from θ1 to θ2. Clockwise rotation negative Counterclockwise rotation positive
qi P r Q sp sq Axis of rotation qf Angular displacement and arc length • Arc length depends on the distance it is measured away from the axis of rotation
Angular Speed • Angular speed is the rate of change of angular position • We can also define the instantaneous angular speed
Average angular velocity and tangential speed • Recall that speed is distance divided by time elapsed • Tangential speed is arc length divided by time elapsed • And because we can write
Average Angular Acceleration • Rate of change of angular velocity • Instantaneous angular acceleration
Angular acceleration and tangential acceleration • We can find a link between tangential acceleration at and angular acceleration α • So
Centripetal acceleration • We have that • But we also know that • So we can also say
Example: Rotation • A dryer rotates at 120 rpm. What distance do your clothes travel during one half hour of drying time in a 70 cm diameter dryer? What angle is swept out? • Distance: s = Dq r and w = Dq/Dt so s = wDtr • s = 120 /min x 0.5 h x 60 min/h x 0.35 m = 1.3 km • Angle: Dq = w Dt = 120 r/min x 0.5 x 60 min = 120x2pr /min x 0.5 h x 60 min/h = 2.3 x 104 r
Rotational motion with constant angular acceleration • We will consider cases where a is constant • Definitions of rotational and translational quantities look similar • The kinematic equations describing rotational motion also look similar • Each of the translational kinematic equations has a rotational analogue
Constant a motion What is the angular acceleration of a car’s wheels (radius 25 cm) when a car accelerates from 2 m/s to 5 m/s in 8 seconds?
Example: Centripetal Acceleration • A 1000 kg car goes around a bend that has a radius of 100 m, travelling at 50 km/h. What is the centripetal force? What keeps the car on the bend? [What keeps the skater in the arc?] Friction keeps the car and skater on the bend
Car rounding a bend • Frictional force of road on tires supplies centripetal force • If ms between road and tires is lowered then frictional force may not be enough to provide centripetal force…car will slide • Locking wheels makes things worse as mk < ms • Banking of roads at corners reduces the risk of skidding…
Car rounding a bend • Horizontal component of the normal force of the road on the car can provide the centripetal force • If then no friction is required Ncosq N Nsinq q Fg
Rotational Dynamics • Easier to move door at A than at B using the same force F • More torque is exerted at A than at B hinge B A
Torque • Torque is the rotational analogue of Force • Torque, t, is defined to be Where F is the force applied tangent to the rotation and r is the distance from the axis of rotation t = Fr F r
F r Torque • A general definition of torque is • Units of torque are Nm • Sign convention used with torque • Torque is positive if object tends to rotate CCW • Torque is negative if object tends to rotate CW q t = Fsinq r
Condition for Equilibrium • We know that if an object is in (translational) equilibrium then it does not accelerate. We can say that SF = 0 • An object in rotational equilibrium does not change its rotational speed. In this case we can say that there is no net torque or in other words that: St = 0
Torque and angular acceleration • An unbalanced torque (t) gives rise to an angular acceleration (a) • We can find an expression analogous to F = ma that relates tand a • We can see that Ft = mat • and Ftr = matr = mr2a (since at = ra) • Therefore Ft r m t = mr2a
Torque and Angular Acceleration • Angular acceleration is directly proportional to the net torque, but the constant of proportionality has to do with both the mass of the object and the distance of the object from the axis of rotation – in this case the constant is mr2 • This constant is called the moment of inertia. Its symbol isI, and its units are kgm2 • Idepends on the arrangement of the rotating system. It might be different when the same mass is rotating about a different axis
Newton’s Second Law for Rotation • Now we have • Where Iis a constant related to the distribution of mass in the rotating system • This is a new version of Newton’s second law that applies to rotation t = Ia
Angular Acceleration and I The angular acceleration reached by a rotating object depends on, M, r, (their distribution) and T When objects are rolling under the influence of gravity, only the mass distribution and the radius are important T
Moments of Inertia for Rotating Objects The total torque on a rotating system is the sum of the torques acting on all particles of the system about the axis of rotation – and since ais the same for all particles: I Smr2 = m1r12+ m2r22+ m3r32+… Axis of rotation
Continuous Objects To calculate the moment of inertia for continuous objects, we imagine the object to consist of a continuum of very small mass elements dm. Thus the finite sum Σmi r2ibecomes the integral
Moment of Inertia of a Uniform Rod Lets find the moment of inertia of a uniform rod of length L and mass M about an axis perpendicular to the rod and through one end. Assume that the rod has negligible thickness. L
Moment of Inertia of a Uniform Rod We choose a mass element dm at a distance x from the axes. The mass per unit length (linear mass density) is λ = M / L
Moment of Inertia of a Uniform Rod dm = λ dx
Example:Moment of Inertia of a Dumbbell A dumbbell consist of point masses 2kg and 1kg attached by a rigid massless rod of length 0.6m. Calculate the rotational inertia of the dumbbell (a) about the axis going through the center of the mass and (b) going through the 2kg mass.
Moment of Inertia of a Uniform Hoop dm All mass of the hoop M is at distance r = R from the axis R
Moment of Inertia of a Uniform Disc We expect that Iwill be smaller than MR2 since the mass is uniformly distributed from r = 0 to r = R rather than being concentrated at r=R as it is in the hoop. dr r R Each mass element is a hoop of radius rand thickness dr. Mass per unit area σ = M / A = M /πR2
Torque Torque: Twist “Turning action of force F ”. Units:Nm Radial component, Fr :does not cause rotation pulling a door parallel to door’s plane. Tangential component, Ft:does cause rotation pulling a door perpendicular to its plane. Ft= F sinφ
r┴ : Moment arm of F Vector quantity r : Moment arm of Ft Sign:Torque >0 if body rotates counterclockwise. Torque <0 if clockwise rotation. Superposition principle:When several torques act on a body, the net torque is the sum of the individual torques
Newton’s second law for rotation Proof: Particle can move only along the circular path only the tangential component of the force Ft (tangent to the circular path) can accelerate the particle along the path.
Kinetic energy of rotation Reminder:Angular velocity, ω is the same for all particles within the rotating body. Linear velocity,v of a particle within the rigid body depends on the particle’s distance to the rotation axis (r). Moment of Inertia
Rotational Kinetic Energy We must rewrite our statements of conservation of mechanical energy to include KEr Must now allow that (in general): ½ mv2+mgh+ ½ Iw2 = constant Could also add in e.g. spring PE
VII. Work and Rotational kinetic energy Translation Rotation Work-kinetic energy Theorem Work, rotation about fixed axis Work, constant torque Power, rotation about fixed axis Proof: