Download
1 / 23
240 likes | 431 Views
Une vision de la géolocalisation et des technologies associées. Groupe Navigation Telecom SudParis Institut Mines-Telecom. Nel SAMAMA. Géolocalisation : ça sert à quoi ?. Dans les temps anciens Revenir à son point de départ, principalement en mer Préparer sa route

E N D
Une vision de la géolocalisation et des technologies associées Groupe Navigation Telecom SudParis Institut Mines-Telecom Nel SAMAMA
Géolocalisation: ça sert à quoi? • Dans les temps anciens • Revenir à son point de départ, principalement en mer • Préparer sa route • Se partager le Monde … • Dans les temps récents • Se déplacer efficacement dans une zone plutôt inconnue (navigation!) • Aujourd’hui … et demain • Comme avant, mais en plus relier le virtuel au réel
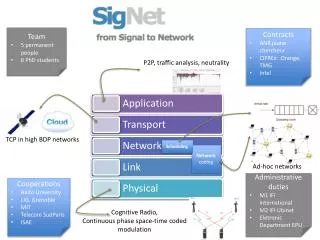
Géolocalisation et Recherche? • Communauté « Positionnement » • Indoor • Fusion de constellations, de signaux, etc. • Hybridation • Communauté « Télécommunications » • Services et applications • Optimalisations diverses (routage, etc.) • Réseaux véhiculaires (Echanges infrastructures terminaux) • Positionnement (aussi!) • Communautés « Energie », « Environnement », …
Géolocalisation: c’est quoi en réalité? • Un ensemble de données d’espace et de temps • Pas indispensable (on s’en passe bien pour le moment dans de nombreux domaines) • Certainement fort utile à des fins «d’optimalisation» • Ayant un lien « assez clair » avec la « mobilité » • Avec des moyens techniques associés • Très divers dans les approches et les technologies • Très divers dans les performances • Très divers dans les niveaux de maturité • Mais nous ne sommes qu’au tout début de l’histoire … • Horloge individuelle portative synchronisée (fin XVIIIème) • Positionnement individuel portatif synchronisé (fin XXème)
Géolocalisation: y a-t-il un besoin? • Pour legrand public • Des choses existent mais si on veut aller plus loin il faudrait • adresser le problème de la continuité du service … • … à coût quasi nul (pour l’infrastructure et le terminal) … • … sans « réelles » spécifications utilisateurs (ou « trop ») • Dans le domaine professionnel • Les évolutions actuelles sont incrémentales etil faut toujours penser en termes de fiabilité et de performances • Pourla recherche • Les travaux sont menés sans échanges entre les communautés !
Il apparaît ainsi assez clairement qu’il existe de nombreuses pistes technologiques (actuelles et futures) qu’elles présentent toutes de fortes limitations que les diverses communautés n’interagissent que faiblement Il me semble manquer la volonté d’échanger et de mutualiser (ce qui réclame un réel effort il est vrai) afin de chercher à dépasser l’horizon proche Nous sommes très disponibles pour aller dans ce sens … et plein d’énergie ! RT 8 ? Alors que fait-on avec la géoloc ?
Nos travaux dans ce contexte: une approche de la continuité du service de positionnement
Les nombreuses solutions De nombreuses solutions ont été proposées Source: Global Positioning, Wiley
45.1120 AP3 AP4 AP2 AP1 45.1116 7.6703 7.6710 Approche WiFi Positionnement WLAN symbolique Définition de zones géographiques • en fonction du niveau du signal reçu (RSSI) • pour chaque point d’accès • Calcul par intersections de zones • Résultat obtenu • symbolique • peu précis • fiable • Adaptable à toutes les • configurations Actual location Symbolic positioning resulting area Calculated location
Approche Réseaux Connectés Exploitation de l’ensemble des liens radio entre terminaux Définition d’un « environnement » de simulation Utilisation de diverses « technologies » WiFi, BT, UWB, GSM/UMTS, GPS, Pseudolites, etc. Choix d’une densité de nœuds de diverses technologies Graphe géographique estimé et liens
Approche Radar et tags actifs Principe du système de localisation en coordonnées polaires en 2D 6-7GHz Duplexeur 7.5-8.5 GHz BPF: filtre passe bande LPF: filtre passe bas
Mesures de distances en TR-UWB • Principe de la Time Delayed Sampling & Correlation (TDSC) • Envoi d’un doublet décalé dans le temps • Premiers résultats TD Référence transmise Impulsion d’information Corrélation Vitesse de corrélation Résultats expérimentaux
Les nouveaux utilisateurs Omniprésence du GPS … de GLONASS, de Galileo, de Beidou, …
Approches GNSS Indoor Répélite 2 Répélite 4 “Les Répélites” Répélite 1 Répélite 3 Générateur de signal Mesures de la porteuse possibles Synchronisation automatique Positionnement dynamique Effet d’éblouissement Multi-trajets
Approches GNSS Indoor Le Near-Far dans le système « répélites » Générateur de Séquence maximale Répélite 1 Répélite 2 Répélite i Répélite n Suppression de l’éblouissement • Principe général • la transmission de deux codes retardés et en opposition de phase • des traitements spécifiques au niveau du récepteur afin d’éliminer les termes d’interférence • l’utilisation d’une séquence maximale
Approches GNSS Indoor Multi-trajets et système « répéteurs » Multi-trajets: l’approche proposée SMICL: Short MultipathInsensitive Code Loop Pour des muti-trajets inférieurs à ½ chip (146m), on montre que Ainsi, le discriminateur proposé (SMICL) Peut être obtenu avec les corrélateurs classiques E, L et P • Avantages • Simple: pas besoin de hardware spécifique • Temps réel
Approches GNSS Indoor Multi-trajets et système « répéteurs » SMICL – enveloppes des erreurs (simulations) Récepteur non filtré
Afin d’améliorer la précision du positionnement Approche classique de lissage du code par la porteuse mesures de code non ambigües mesures de code "précises" Approches GNSS Indoor L’amélioration de la précision dans le système « répélites » OK Problème: Le code est trop bruité en intérieur, principalement à cause des travaux multiples SMICL
Approches GNSS Indoor Premiers résultats en positionnement relatif Positionnement relatif: position initiale connue Précision bien en dessous du mètre en relatif
Approches GNSS Indoor Premiers résultats en positionnement absolu Positionnement absolu: position initiale inconnue Moyenne des mesures de codes sur 10 secondes • Position initiale partiellement résolue
Approches GNSS Indoor Version actuelle du système Déploiement typique Précision bien en dessous du mètre en relatif
Approches GNSS Indoor Derniers résultats en positionnement relatif Résultats stabilisés et représentatifs de l’approche
Notre proposition de continuité globale CEA-LIST/LISA & IMT/Groupe Navigation • Les techniques retenues pour l’extérieur • GNSS • Inertiel • Les techniques retenues pour l’intérieur • GNSS Indoor • Inertiel • Les grandes lignes • Couvrir le large éventail des environnements indoor • En combinant radio (larges espaces) et inertiel (milieux plus confinés) • Ce qui permet un calibrage régulier de l’inertiel • Continuité globale entre extérieur (GNSS+Inertiel) et intérieur (GNSS+Inertiel)! • Complément des systèmes actuels également pour l’extérieur!!