Download
1 / 61
610 likes | 789 Views
Project Design Review DIABLO De-rotated Imager of the Aurora Borealis in Low-earth Orbit. Nicole Demandante Laura Fisher Jason Gabbert Lisa Hewitt. Lang Kenney Nick Pulaski Matt Sandoval Tim Sullivan.

E N D
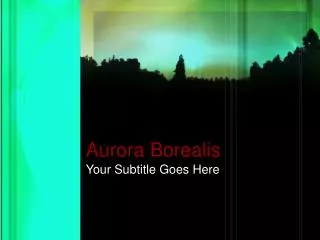
Project Design ReviewDIABLODe-rotated Imager of the Aurora Borealis in Low-earth Orbit Nicole Demandante Laura Fisher Jason Gabbert Lisa Hewitt Lang Kenney Nick Pulaski Matt Sandoval Tim Sullivan Image taken from Space Shuttle over South Pole: http://www.geo.mtu.edu/weather/aurora/images/space/
Agenda • Background, objectives, requirements • System Design Alternatives • System Design-To-Specifications • Subsystem Design Alternatives • Project Feasibility and Risk Assessment • Project Management Plan
Initial Idea: LASP - Monitor Proposal Scientific Purpose: Visible light images and in-situ observations Background
Objective: Provide a spinning satellite with a de-rotated imaging system Deliverables: De-rotated imaging assembly Spinning test bed Control loop Goal: Achieve the least amount of smear in the image Model final fight spacecraft Objective
System Level Design-to-Specs • The system shall … • Optical System • Take pictures at 90° • Pointing within 3° • Field of view minimum of 6° Optical Axis Spin Axis 12° 3° Earth
System Level Design-to-Specs • Control Loop • Pixel smear - Images can be resolved to better than 1 pixel per kilometer * • Sun-shading Assembly • No direct sunlight between 60° and 90° latitude • Test System • Test bed range: 2 – 20 rpm • Offset Test – Tilt 1° relative to test bed • Test camera resolution to shutter speed ratio similar to flight camera *Changed from PDD, customer approved
System Designs • Optical and Spin Axis Alignment • Design will be used by customer
Fixed Cameras Passive Stabilization System Designs Spin axis Spin direction Cameras Cameras Booms
Rail Car Parallel Plate System Designs
System Level Design Comparison Fixed Camera Passive Stabilization Axis Allignment Rail Car Parallel Plate For more detail see slides 41 - 46
Subsystems • Optical • Rotation • Structure • Electronics & Sensors • Controls & Data Acquisition • Power
R = 0.75 – 1 m h 6° RTest Sizing • Actual spacecraft will use two de-rotated assemblies r R = 0.75 – 1 m “Design-To” Radius R=0.75-1m • Actual test platform does not need to be this large so long as the height is sufficient to meet above requirement
Requirements on flight camera Long focal length (~10cm) Thermal shielding Radiation shielding Moment of Inertia Camera Choice: COTS “point and shoot” Mirror Mirror Arrangement For more detail on camera choice, see slide 47
Resolution Operating Range: -90 ° to -60° and 60° to 90° Depends on Orientation of Orbit
Precision Motor Options Direct Drive Servo Motor Stepper Motor Brushless Servo Motor
Motor Mounting Designs Stepper/Servo Motor Mounting • Motor does not support axial loads • Structure must be supported by test bed Direct Drive Motor Mounting • Motor supports axial loads • Structure can be mounted directly to motor For bearing options, see slide 49
Option #1 Option #2 Option #3 Structural Design • Requirement: • Bending < 6 microns (pixel smear req.) • Bending < 0.3° (pixel smear req.) • Stiffness of structure Judgment criteria: Lest mass, Moment of inertia, Deflection
Periscope Dimensions Requirements 12° Field of View Shade lens from direct sunlight Structural design: Sunshade
Structure design: deflection requirement feasibility Approximation: cantilever beam • Requirement: • Bending < 6 microns (pixel smear req.) • Bending < 0.3° (pixel smear req.) • Stiffness of structure Meets Requirement Fails Requirement! Solution: substitution of support rods with truss structure For more detail, see slide 50
Structural design: Material selection Design to goal: Highest Mass/Stiffness • Other Considerations: • Availability • Cost • Fatigue Strength • Coefficient of thermal expansion • Good Selections • Aluminum 2024-T3 • Aluminum 5182-O • Steel 4130 For more detail on material selection, see slide 51
Encoder option preferred over Resolver Low speed operations Accuracy Minimal Complexity Cost Ability to Modify Motors/Sensor package Availability Absolute Position Encoders can measure angular position and velocity Tachometer or Rate Gyro may be used in conjunction with Encoder Sensors • Accelerometers will be used to measure the vibrations For more detail on electronics, see slides 52, 53, 54
Environmental Torques Applied Control Torque Position Sensor Kinematics Control Law Motor Torque Angular Velocity Sensor Dynamics Control Law (PID) Simulation and Software Algorithms Dynamics (calculate angular rate) Kinematics (calculate angular position)
Test Set Up • Verification: • ωDe-rotated= ωRotated • ractual=rdesired • Lflight=Lmodel • Validation • Image analysis For more detail on controls, see slide 57, 58
Power • Design Criteria • Complexity • Cost • Mass • Volume • Possible Solutions • Slip Rings: • Mercotac Rotary Electrical Connectors • Conductix R Series Slip Rings • Moog 6300 Series Slip Rings • Batteries • Nickel Cadmium • Nickel Metal Hydride • Lithium Ion • Slip Ring/Battery Combination For more detail on power, see slide 55, 56
Work Breakdown Structure DIABLO Systems Engineer Management Laura Fisher Optics Jason Gabbert Structures Tim Sullivan Laura Fisher Lang Kenney Rotation Matt Sandoval Jason Gabbert Power Nick Pulaski Verification Nicole Demandante Controls Lisa Hewitt Tim Sullivan Nick Pulaski Scheduling Camera Selection Imaging Platform Design Rotation Design Identify Power Needs Identify Verification Needs Software Diagrams Task Management Testbed Sizing Motor Selection Hardware Selection Hardware Selection Test Set Up Sunshade Design Group Management Define Pixel Smear Bearing Selection Data Acquisition and signal conditioning Testbed Simulation Testbed Design Risk Management Geometry Design Integration with Sensors CAD Model Software Algorithm FEM analysis Final Testing Fabrication
Schedule through CDR For rest of detailed schedule, see slide 59
Schedule for Spring Semester More detailed schedule, see slide 61
Risk Matrix Consequence Probability
Conclusion • System design and subsystem design options will fulfill customer requirements and expectations • System design is feasible within the budget, time, and expertise level Image – FAST satellite artist sketch: http://sprg.ssl.berkeley.edu/fast/
References • Fundamentals of mechanical vibrations, S. Graham Kelly, McGraw-Hill, Inc. • Engineering Mechanics Dynamics, Bedford/Fowler, Prentice Hall, 2005 • http://www.mercotac.com/html/products.html • http://www.conductix.com • http://www.polysci.com • http://www.onlybatteries.com • http://www.panasonic.com/industrial/battery/oem/ • http://www.bbma.co.uk/batterytypes.htm
Pros and ConsFixed Camera • Pros: • Mechanically less complicated, no moving parts • Control system not required • Proven technology • Cons: • Complete coverage would require 30 cameras with a 12° field of view. • For the given camera shutter speed (100ms), resolution (1Meg), and field of view (12°) and assuming only a 1 pixel smear, the maximum rotation rate would be 0.11718°/s. Actual rotation rate is ~72°/s. Back to system level choice
Pros and ConsPassive Stabilization • Pros: • Simple design, easy to construct • No de-spun motor required • Aligns camera with magnetic field lines without help from main satellite • No control loop needed • Cons: • Difficulty with verification • Potential interference with the science hardware • Possible pointing and stability issues • Can’t point camera off of magnetic field lines if desired Back to system level choice
Passive Stabilization Calculations • Assuming that the de-rotated section is a solid cylinder of radius R=15cm with mass m=0.5kg the moment of inertia I is: • If we want to be able to accelerate the despun portion to an angular velocity ω of 72 degrees/s (the speed of the satellite) within 1 second in a frictionless environment, the required torque τ will be: • To get the desired torque with a magnetic field strength of B=20,000 nT (the field strength from orbit) the magnet must have a linear dipole moment μ of: • Using the magnetic torquers found at http://www.smad.com/analysis/torquers.pdf a torque rod which can generate a linear dipole moment of 80 Am2 has a length of 0.5m, 2 coils, and draws 4.7W of power at 28V. This gives a turn density n and current i of: • At the center of a long solenoid the magnetic field strength B=μni where μ=μ0*k. The relative permeability of a nickel alloy for the core is about k=8000, so the field strength generated by this magnet is: Back to system level choice
Rail Car Calcuations • Pros: • A small movement in the motor will not result in a large deviation in pointing accuracy • Not as stringent requirements on motor sensitivity as other suggested designs. • Cons: • Thermal expansion would cause large errors • Radius could expand by up to 5% (depends on material) • Momentum balancing requirements would require additional masses and precise balancing • Scaling with actual satellite would not be a feasible size, requiring an unreasonably large track • Changing moment of inertia would result in scaling issue for the control loop • Electrical system very complicated and expensive – would require large slip ring Back to system level choice
Parallel Plate Calculations • Pros: • Simple construction • Cons: • Masses not evenly balanced would create precession in the top plate. • Requires the addition of excess mass • May not be able to meet the sun shading requirement • Scaling Back to system level choice
Optical and Spin Axis Allignment Calculations • Pros: • Easiest to balance mass • Lots of space and flexibility in mounting camera • Smallest amount of mass (lack of ballast) • Less susceptible to thermal expansion issues • Scalable to actual flight instrument • Cons: • Complicated attachment to testbed • Stability issues • Jitter, vibration Back to system level choice
CameraLevel 1 Trade Study Features: Zoom, Wireless, Timers Adjustability: Shutter, Aperture, Flash Samples Back to optics
Rotation • Test Bed Motor • Simulates the rotation of spinning satellite • Does not require precise control • No size, weight or power constraints • Options • AC or DC motor • Inexpensive • Single voltage input • Simple manual control
Bearing Options Thrust Ball Bearings Ball Bearings Cylindrical Roller Tapered Roller Bearings Bearings Back to rotation
Periscope ω Satellite r Structural design S/C Configuration: L F =mrω² Modeled As Cant. Beam: θ v m = ¼ Total System Mass Back to structure
Material Selection Back to materials