Download
1 / 11
110 likes | 272 Views
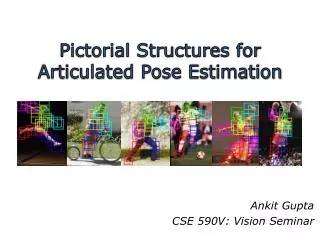
Presentation 7 - Pictorial Structures Ruben Villegas. Collection of local templates. They deform and articulate with respect to one another. Types of Models. Star Models: Each part is independently related to a root bounding box. Tree Models:

E N D
Collection of local templates. • They deform and articulate with respect to one another.
Types of Models • Star Models: • Each part is independently related to a root bounding box. • Tree Models: • Each part is independently related to a parent part. • Double counting of parts is a limitation.
Part Models • Color Models: • Based on color detection like skin color for head. • This would not work for limbs because of clothes and illumination changing conditions. • HOG(Histogram of Oriented Gradients) • Based on gradient direction and magnitude. • Gradients are binned into 9 orientations over local neighborhoods of 8x8. • This is done on 16x16 windows resulting in a 1x36 vector.
Structural Constrains. • Linearly-Parameterized spring model • Score each possible configuration of z where z is the set of K parts locations in a model. • is the appearance term where is the HOG filter for part i and the image descriptor at location . • is deformation term where determines the maximum non-relation between parts and the weight between related parts connections.
Articulation • Augmenting spatial relational model with model orientation and foreshortening, also relative location. • Image must be convolved with part templates at different rotations and foreshortening. • This parameterization increases computational burden.
Inference • MAP estimation • Maximize S(x,z) where x is the picture and z the set of parts location in a model. • Done with dynamic programming. • computes the score map of part j in all locations of model zjby collecting messages from the children of j. • is the message passed by then children of j.
checks the best scoring position of child j for part i. • The best scoring configuration for each root position will be in score1. • Get multiple detections using these scores by thresholding them. • Eliminate overlaps using non-maximum suppression.
Gaussian Tree Models • Spatial prior:
Temporal Pictorial Structures • Detect candidate parts from pictorial structures in each frame with an edge-based part detector. • Use clustering to identify parts that look similar across time. • Discard clusters that move too fast in some frames. • Detect torsos that move smoothly across time first. • Based on torsos detect the rest of the parts