Download
1 / 22
220 likes | 431 Views
例 3 :外界センサー 人間. モーションキャプチャ: 運動データ 床半力 外力 逆運動学計算. 例 3 :外界センサー 人間. 動作画像. モーションキャプチャー. モーションキャプチャー. 逆運動学. 逆力学. 例 3 :外界センサー 人間. 15 リンク [Nakamura et al. 2000] , [Venture et al. 2008] 34 自由度 (DOF) マーカーから逆運動学計算 →関節角度、速度、加速度 [Yamane et al. 2003]. 例 3 :外界センサー 人間 モデリング・最少パラメータ.

E N D
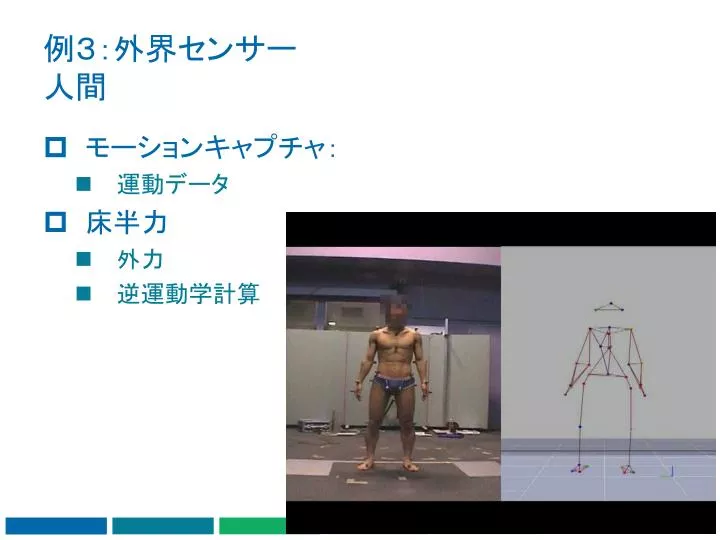
例3:外界センサー人間 • モーションキャプチャ: • 運動データ • 床半力 • 外力 • 逆運動学計算
例3:外界センサー人間 動作画像 モーションキャプチャー モーションキャプチャー 逆運動学 逆力学
例3:外界センサー人間 • 15 リンク [Nakamura et al. 2000], [Venture et al. 2008] • 34 自由度(DOF) • マーカーから逆運動学計算 →関節角度、速度、加速度 [Yamane et al. 2003]
例3:外界センサー人間モデリング・最少パラメータ例3:外界センサー人間モデリング・最少パラメータ • Standard parameters = full set of inertial parameters • Base parameters = identifiable parameters from inverse dynamics only (YB of full rank) 15
同定のため適当な動作は? • リグレサーの状件数
例3:外界センサー人間・RT同定 • モーションキャプチャ(motion analysis) • 床半力(Kistler) • Screen for visual feedback • PC for motion acquisition • PC for real-time computation
例3:外界センサー人間・RT同定 • From motion capture (RT IK computations) and force-plates (RT generalized effort computations) base and SP are identified with RT method (recursive algorithm)
Geometric scaling and initial SP • Measure the geometric parameters of the model from motion capture: automatic scaling from marker positions • Estimate the initial SP f ref from geometric parameters and database of human body. Initial geometric parameters and SP identification for 3 candidates with 3 different morphologies: 1.73m 58Kg, 1.62m 54Kg and 1.76m 76.3Kg
Persistent Exciting trajectories • Using RT color changes to specify the links not yet completely identified, results are obtained in a shorter time with more accuracy.
Real time identification of the human dynamics Persistent Exciting trajectories
同定結果 • Comparison of some identified parameters with literature [Young et al. 1983]
応用:スポーツトレーニング • 33 year old female • Stanton marathon training program in preparation for the 2009 Tokyo Marathon. • Training program = 16 week program • 5-days a week running schedule • Gradually increased running distance from 20km/week to 80km/week in the peak 13th week, then tapering in the final 3 weeks before the race. • Prior to that subject runs 25km/week • Record on a weekly basis / several sessions omitted
例4:関節粘弾性の同定 • Biomechanics developed methodologies for measuring various dynamics properties of the human body • Determination of standard values of joints’ visco-elastic properties based on well calibrated measuring equipments and averaging of data of many subjects. • Equipment need mechanical stiffness and accuracy ⇒heaviness and bulkiness (dynamometer) ⇒not applicable to everyone, specially to people under rehabilitation and medical treatments. ⇒System to measure patient-specific visco-elastic properties of limb joints without pain and constraints highly required.
例4:関節粘弾性の同定 • Joint modelling • Model of visco-elastic properties adapted from biomechanics most popular model +Identification of human joint passive dynamics, Proc. of the IEEE Int. Conf. on Robotics and Automation, pp 2960-2965, 2006. +Identification of Human Limb Visco-Elasticity Using Robotics Methods to Support the Diagnosis of Neuromuscular Diseases, Int. J. of Robotic Research (to be publiched)
実験結果 • Possible discrimination of patients 21
終わり • 参考論文 • W. Khalil and E. Dombre. Modeling, identification and controlof robots. Hermès Penton, London-U.K, 2002. • Y. Nakamura, Advanced Robotics: Redundancy and Optimization,Addison-Wesley Longman Publishing Co., Inc, 1990. • G. Venture, K. Ayusawa, and Y. Nakamura, “Motion capture basedidentification of human inertial parameters,” in Proc. IEEE/EMBS Int.Conf. on Eng. in Medicine and Biology, 2008, pp. 4575–4578. • G. Venture, K. Ayusawa, and Y. Nakamura, “Dynamics identificationof humanoid systems,” in Proc. CISM-IFToMM Symp. on RobotDesign, Dynamics, and Control (ROMANSY), 2008, pp. 301–308. • Y. Fujimoto, S. Obata, and A. Kawamura, “Robust biped walking withactive interaction control between foot and ground,” in Proc. of theIEEE Int. Conf. on Robotics and Automation, 1998, p. 2030˝U2035. • K. Yoshida, D.N. Nenchev, and M. Uchiyama, “Moving base roboticsand reaction management control,” in Proc. of the Seventh Int. Symp.of Robotics Research, 1995, p. 100˝U109. • H. Mayeda, K. Osuka, and A. Kangawa, “A new identification methodfor serial manipulator arms,” in Proc. IFAC 9th World Congress, 1984,pp. 2429–2434. • C.G. Atkeson, C.H. An, and J.M. Hollerbach, “Estimation of inertialparameters of manipulator loads and lunks,” Int. J. of RoboticResearch, vol. 5, no. 3, pp. 101–119, 1986. • H. Kawasaki, Y. Beniya, and K. Kanzaki, “Minimum dynamicsparameters of tree structure robot models,” in Int. Conf. of IndustrialElectronics, Control and Instrumentation, 1991, vol. 2, pp. 1100–1105. • W. Khalil and F. Bennis, “Symbolic calculation of the base inertialparameters of closed-loop robots,” Int. J. of Robotics Research, vol.14(2), pp. 112–128, April 1995. • M. Gautier, “Numerical calculation of the base inertial parameters,”J. of Robotic Systems, vol. 8(4), pp. 485–506, 1991. • K. Ayusawa, G. Venture, and Y. Nakamura, “Inertial parametersidentifiability of humanoid robot based on the baselink equation ofmotion,” Proc. of the Conf. on Robotics and Mechatronics, 2P1-F09,2008, (in Japanese).